

Robot stack disassembling method of irregular random materials
A robot and irregular technology, applied in the direction of destacking of objects, stacking of objects, instruments, etc., can solve the problems of random random material size, difficulty in destacking by robots, etc., and achieve the effect of reducing workload.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
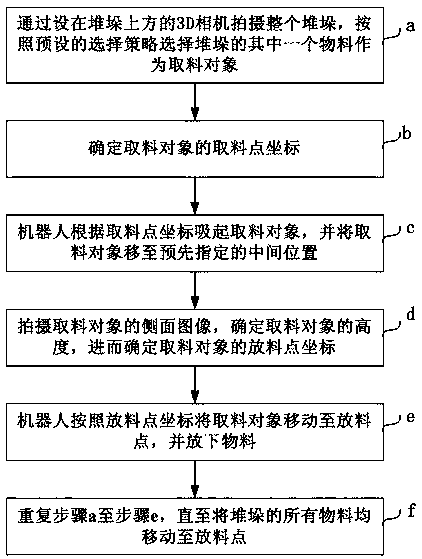
[0019] see figure 1 . The robot unstacking method for irregular random materials according to the first embodiment of the present invention includes the following steps:
[0020] a. The entire stack is photographed by the 3D camera installed above the stack, and based on the image information captured by the 3D camera, one of the materials in the stack is selected as the reclaiming object according to the preset selection strategy;
[0021] b. Determine the coordinates of the pick-up point of the pick-up object;
[0022] c. The robot picks up the reclaimed object according to the coordinates of the reclaimed point, and moves the reclaimed object to the pre-designated intermediate position;
[0023] d. Take a side image of the reclaiming object, determine the height of the reclaiming object, and then determine the coordinates of the dischar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More