

Orchard mobile robot and headland turning method
A mobile robot and robot technology, applied in two-dimensional position/channel control, etc., can solve problems such as high cost, inaccurate positioning, and GPS signal occlusion, and achieve high accuracy, strong flexibility, and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention is further described below in conjunction with accompanying drawing:
[0036] see Figure 1 to Figure 10 , a kind of orchard mobile robot, comprises body 4, wheel 5, controller 3, binocular camera 2 and electronic compass 1; Wheel 5 is arranged on the bottom of body 4, and controller 3 is arranged on body 4, and controller 3 controls The wheels 5 rotate; binocular cameras 2 and electronic compass 1 are installed at both ends of the top of the vehicle body 4 ; both binocular cameras 2 and electronic compass 1 are connected to the controller 3 .
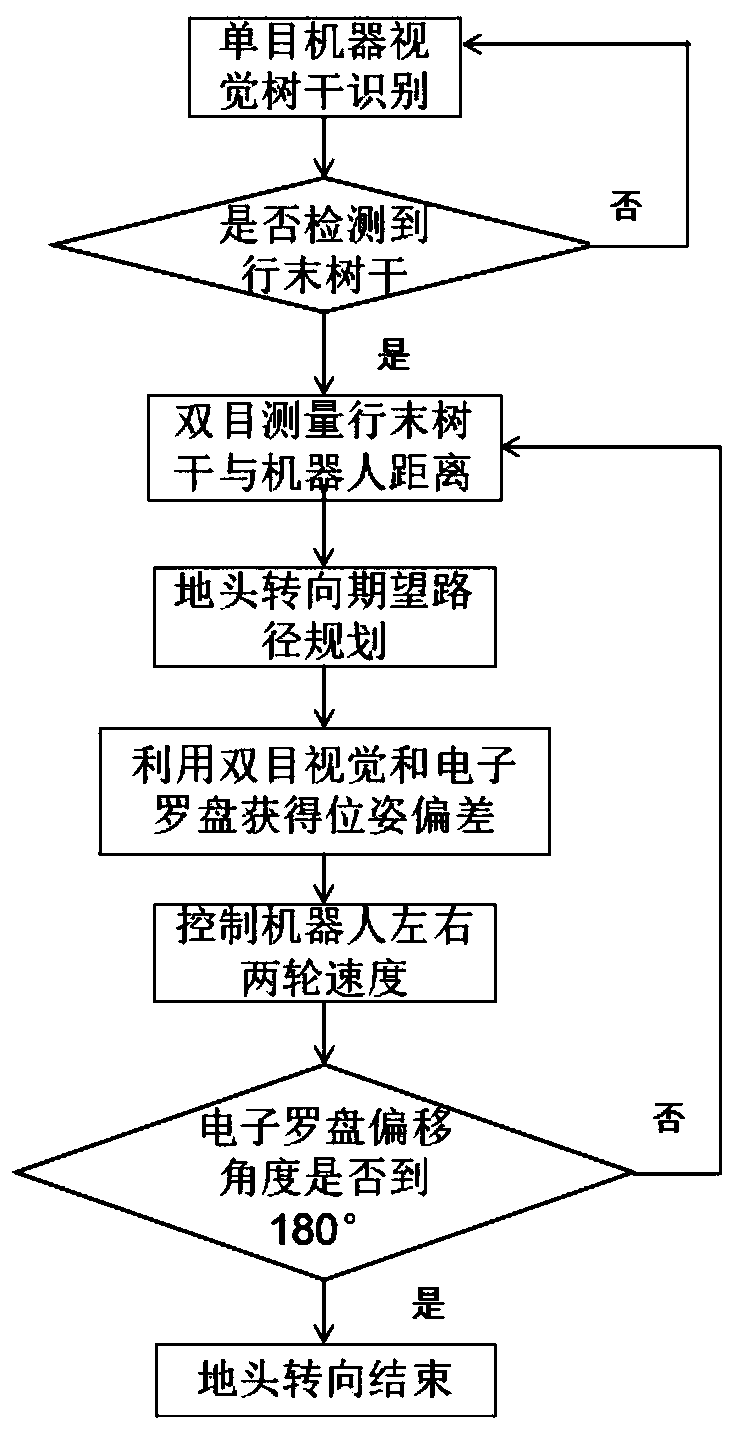
[0037] A kind of orchard mobile robot based on claim 1, comprises the following steps:
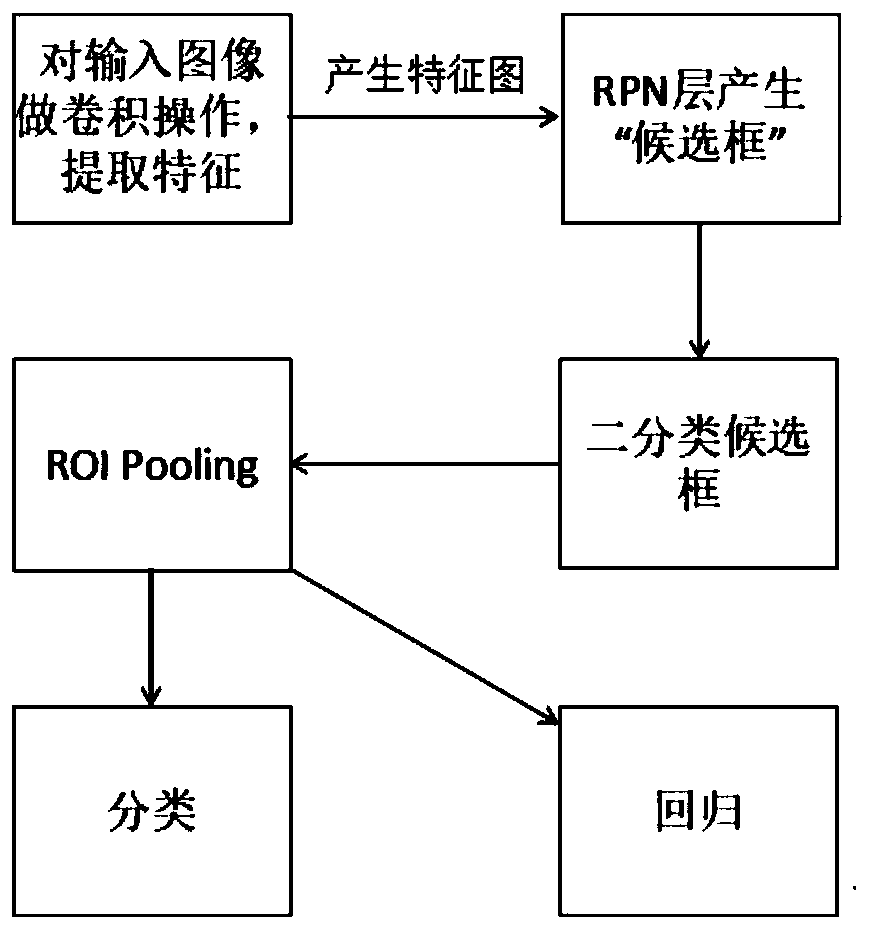
[0038] Step 1, Faster R-cnn neural network for trunk recognition;
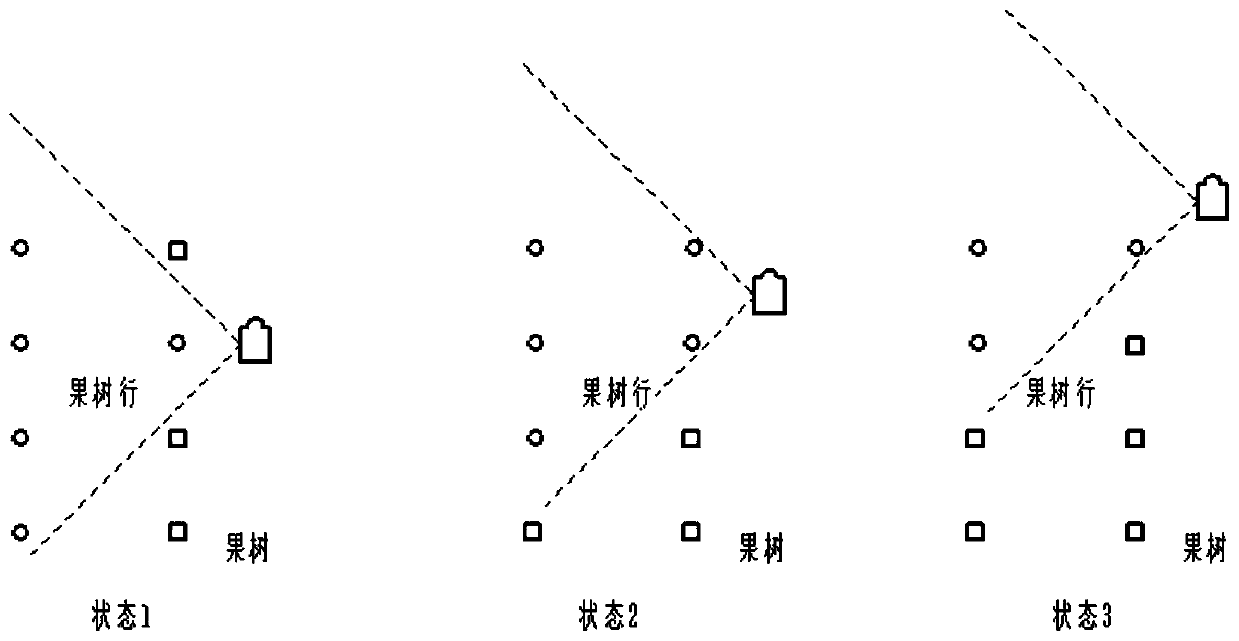
[0039] Step 2, judge the position of the end of the fruit tree row by identifying the trunk;
[0040] Step 3, after reaching the end of the line, determine the turning radius d through the binocular camera;
[0041] Step 4, the controller controls t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More