

Robot group cooperative active sensing method based on self-organized mapping
A technology of self-organizing mapping and robotics, applied in the direction of two-dimensional position/channel control, etc., to achieve the effect of expanding the research field, simplifying the complexity, and reducing the computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
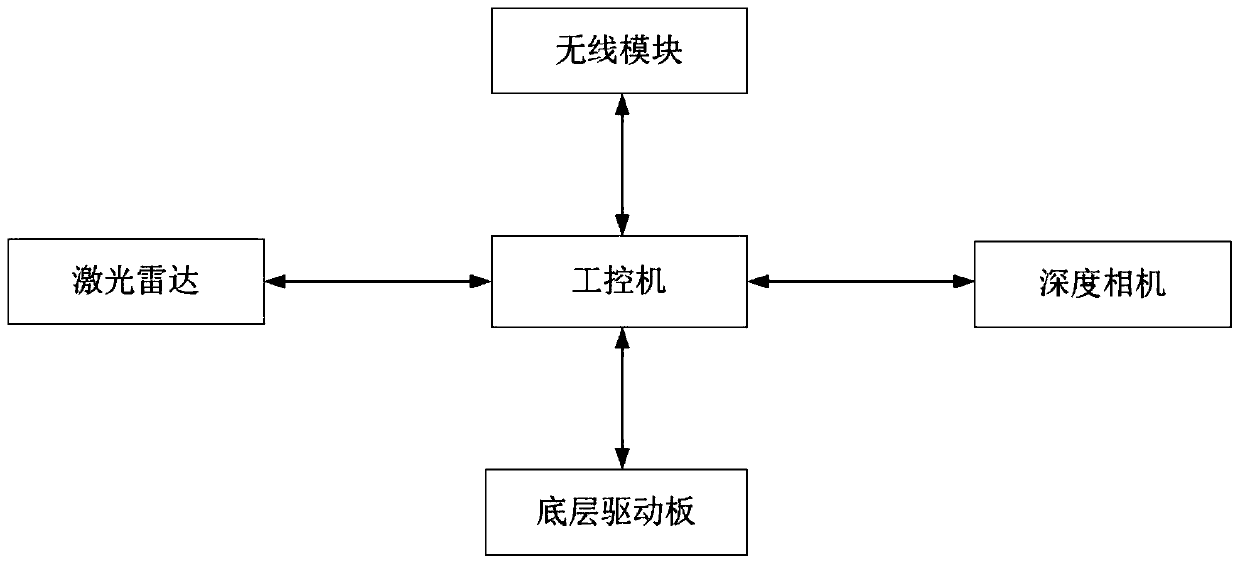
[0020] A self-organizing map-based robot group cooperative active perception method proposed by the present invention, figure 1 It is an integral part of each robot in the robot group involved in the present invention, and each robot has the same configuration, and is equipped with a bottom drive board, an industrial computer, a wireless module, a depth camera and a laser radar respectively. Among them, the robot perceives the surrounding environment through the depth camera, the laser radar is used for auxiliary detection, and the depth camera and the laser radar are collected synchronously. Handling and controlling the robot, the bottom driver board controls the work of the bottom motor to provide the robot with the power to move forward. In the robot of this embodiment, the turtlebot3 mobile robot is used as the main body, with three omnidirectional...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More