

Unmanned system control method based on Wi-Fi assisted positioning
An unmanned, assisted positioning technology, applied in the field of unmanned system navigation, can solve the problems of inaccurate routes, endangering national and social security, and difficult goals for unmanned systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
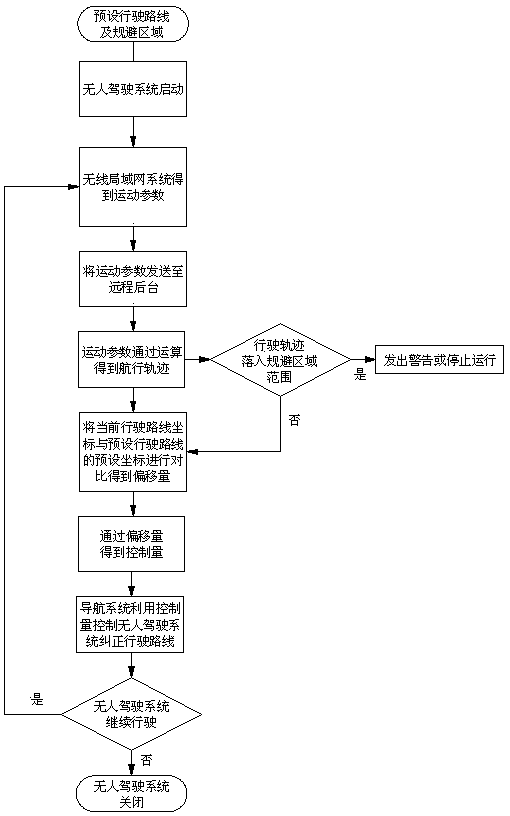
[0019] Combine below figure 1 A kind of unmanned driving system control method based on Wi-Fi technology assisted positioning of the present invention, make further explanation:
[0020] The unmanned driving system mentioned in the present invention includes aircraft (unmanned aerial vehicles), unmanned driving devices on the ground (such as unmanned vehicles) and surface navigation equipment.
[0021] A control method for an unmanned driving system based on Wi-Fi technology-assisted positioning of the present invention is to use Wi-Fi technology to connect electronic equipment to a wireless local area network system to monitor the path and driving route process of the unmanned driving system, Then avoid the forbidden areas determined by the relevant state departments or the areas that are avoided according to the requirements of the relevant state management departments, and take emergency measures when entering the avoidable areas for some reason. The specific steps are as f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More