

Lane line detection method based on threshold self-adaptive binaryzation and connected domain analysis
A connected domain analysis and lane line detection technology, applied in the field of lane line detection based on threshold adaptive binarization and connected domain analysis, can solve the problem of not being able to effectively remove the influence of noise such as road shadows and signs, and not fully utilizing lanes Line space characteristics, not fully applicable to dynamically changing traffic scenes, etc., to achieve the effects of easy installation, reducing road shadows, and reducing product costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
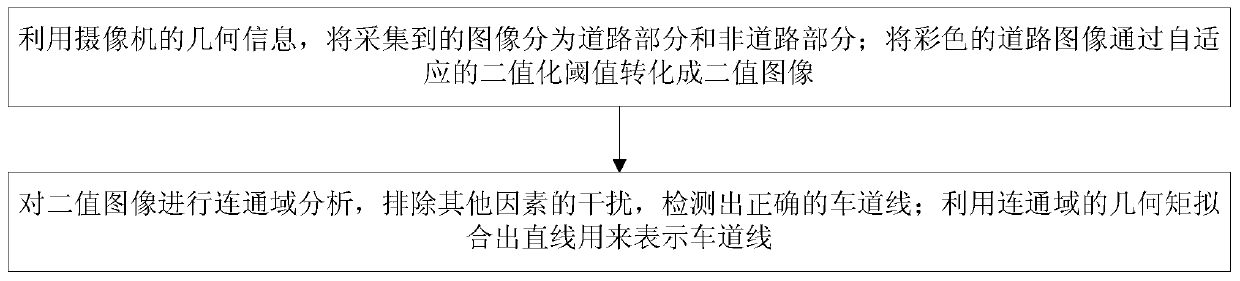
[0051] An embodiment of the present invention provides a lane line detection method based on threshold adaptive binarization and connected domain analysis, see figure 1 , the method includes the following steps:
[0052] 101: Using the geometric information of the camera, divide the collected image into a road part and a non-road part;
[0053] 102: Convert the colored road image into a binary image through an adaptive binarization threshold;
[0054] 103: Perform connected domain analysis on the binary image, eliminate the interference of other factors, and detect the correct lane line;
[0055] 104: Use the geometric moments of the connected domain to fit a straight line to represent the lane line.
[0056] In summary, through the above steps 101 to 104, the embodiment of the present invention utilizes the feature that lane line pixels occupy a fixed proportion in the grayscale image to realize threshold adaptive binarization, and according to the connected domain of the l...
Embodiment 2
[0058] The scheme in embodiment 1 is further introduced below in conjunction with specific calculation formulas and examples, see the following description for details:
[0059] 1. Lane image extraction
[0060] 1. Capture image
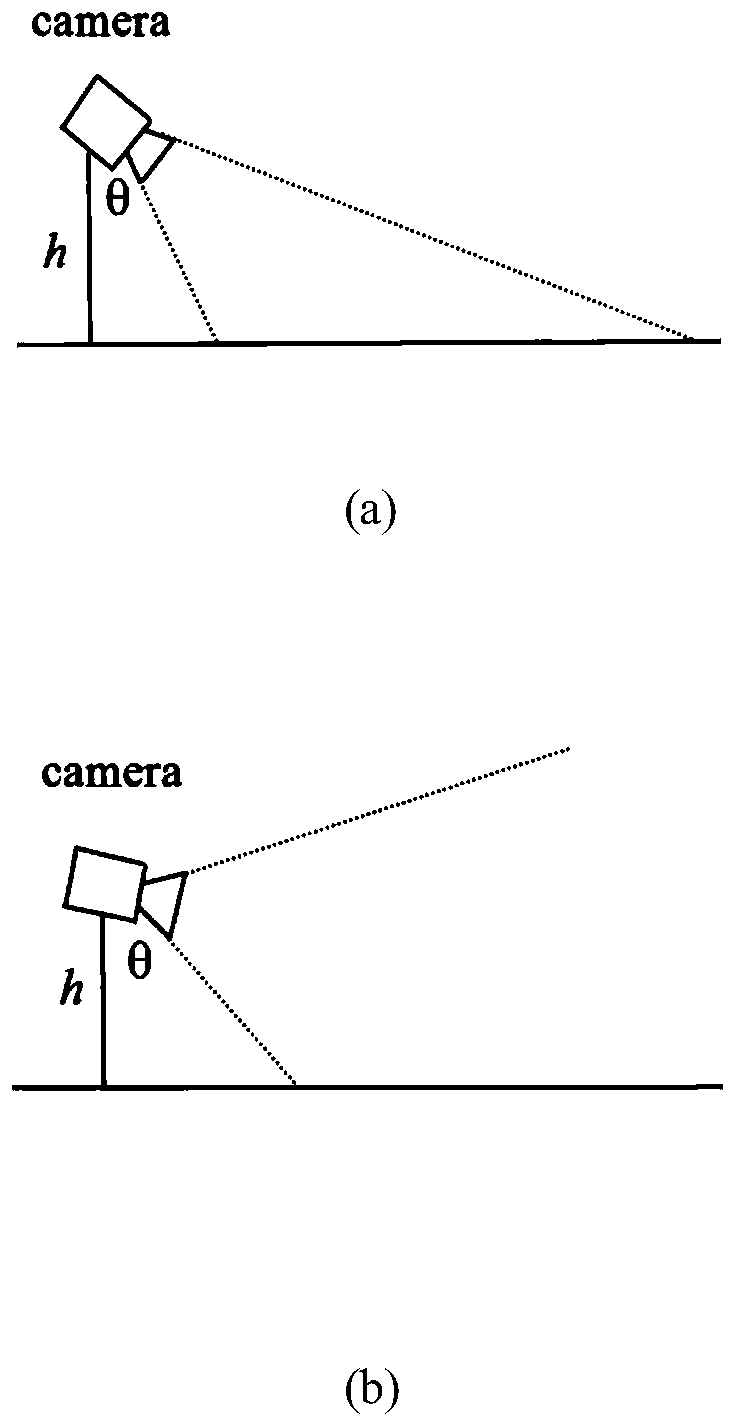
[0061] In order to realize the function of assisted driving, the camera should be installed on the vehicle to capture the road surface image, and ensure that the vehicle is driving in the correct lane by measuring the lane boundary. The installation of the camera involves three parameters: the installation position of the camera, the height of the installation of the camera and the tilt angle of the camera lens.
[0062] In order to make the lane to be detected approximately appear in the central part of the image to be detected, the central axis of the camera and the vehicle should be on the same plane. The installation height and lens angle can be adjusted according to the actual height of the vehicle and the resolution of the camera, as long as th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More