

barrier perception method based on an RGB-D camera
A technology of obstacles and RGB images, applied in the field of computer vision, can solve the problems of inability to meet the application requirements of mobile robot navigation, poor real-time performance, and large amount of calculation, and achieve the effects of low cost, improved adaptability, and strong real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
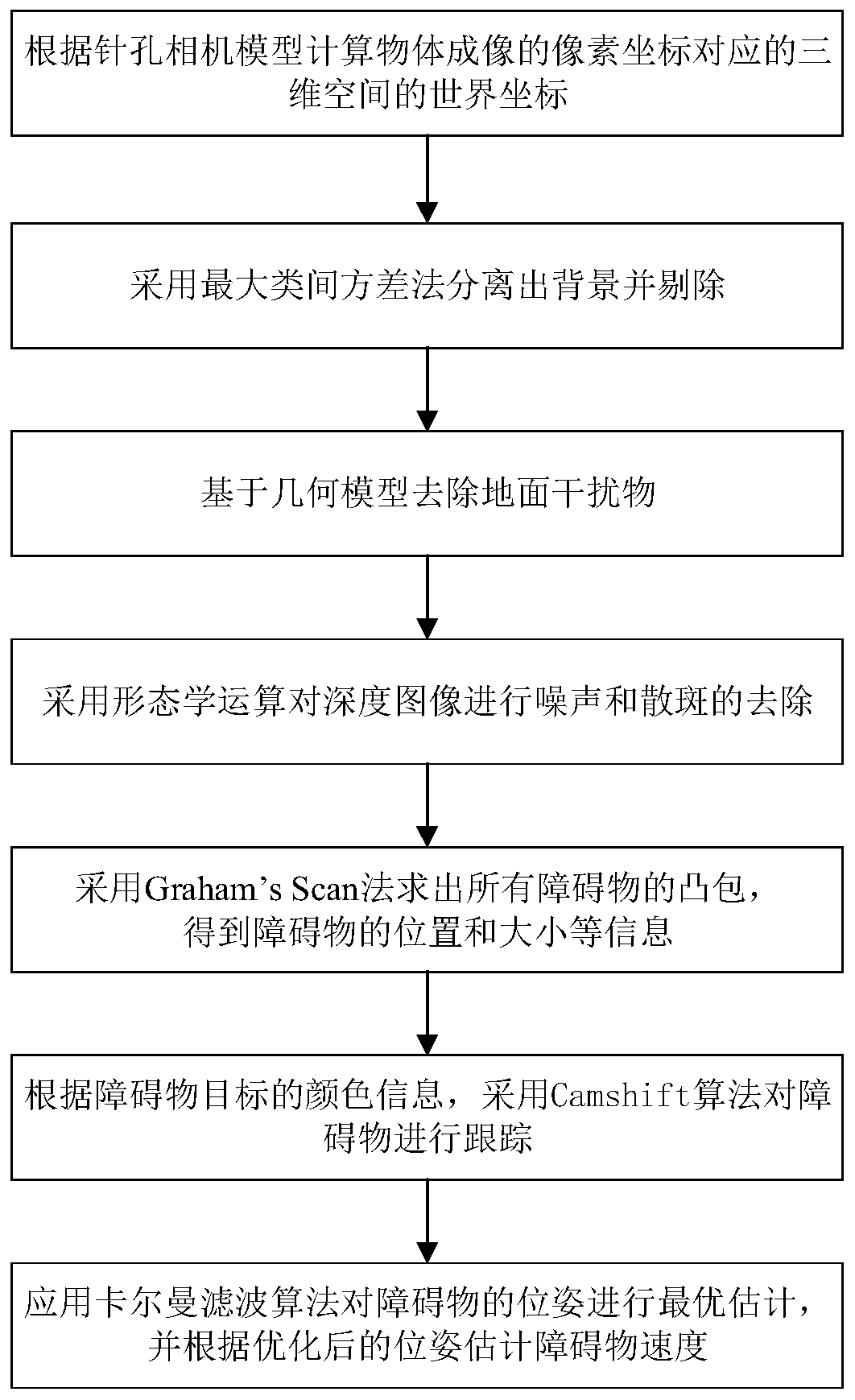
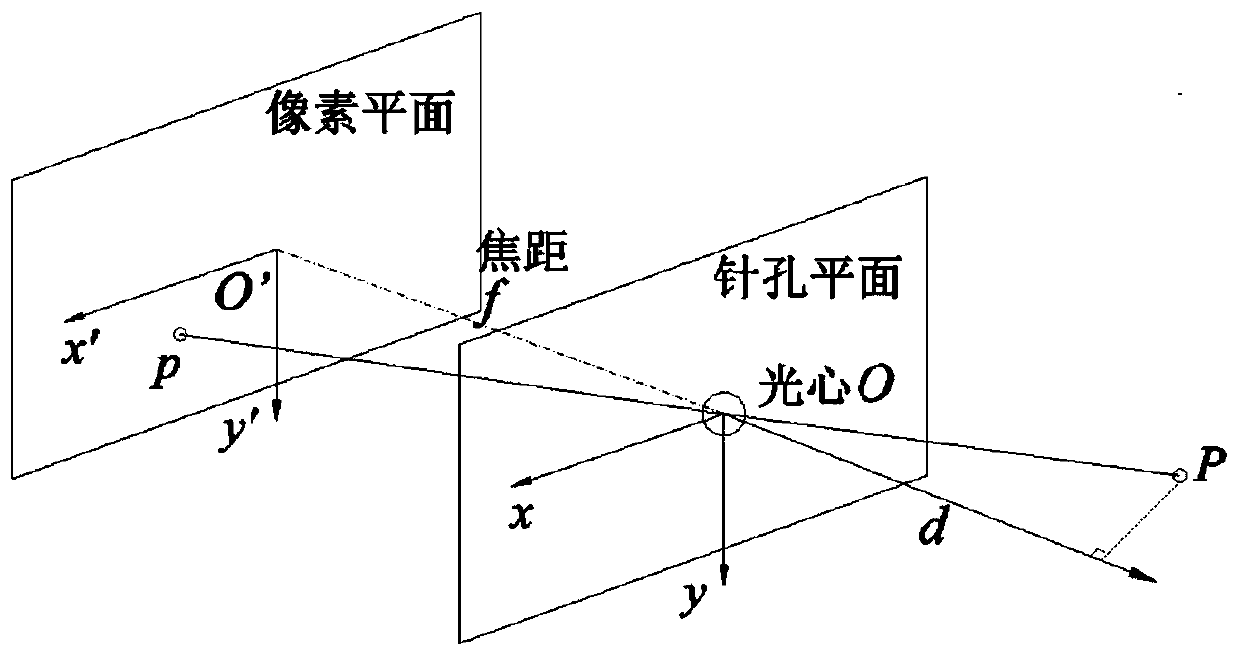
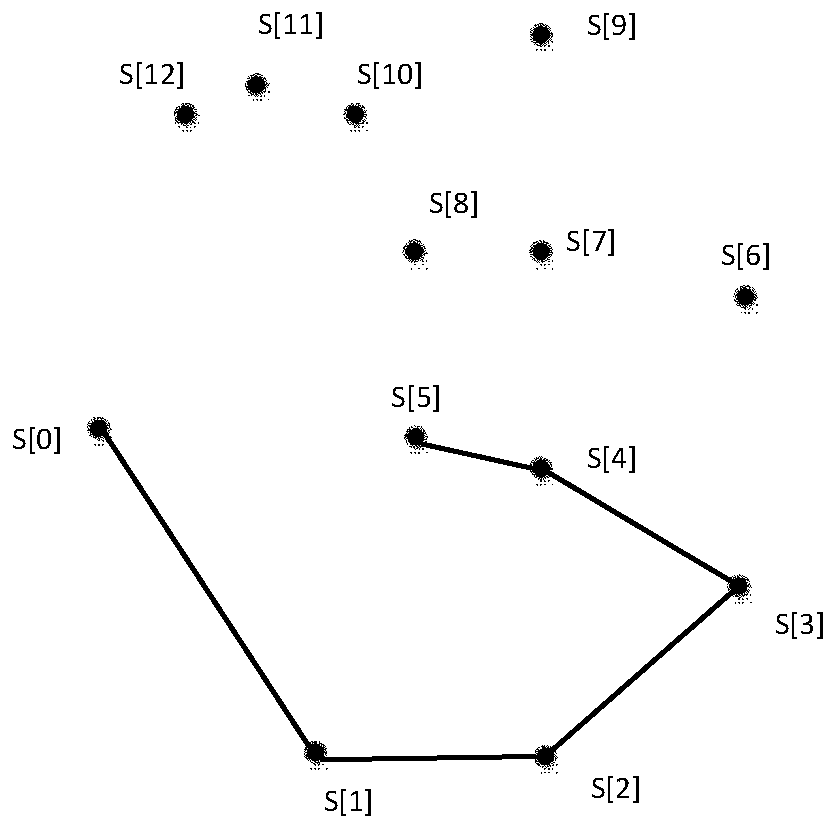
[0029] Such as figure 1 , figure 2 , Figure 3(a)-Figure 3(d) and Figure 4 As shown, an obstacle perception method based on RGB-D camera, the optimal threshold value of the depth image can be obtained by the maximum between-class variance method, and the background and target in the depth image can be roughly segmented according to the threshold value, and then according to the needle The hole camera model can calculate the three-dimensional space coordinates of the scene points corresponding to each pixel on the image, and set a height threshold. For the scene points below the threshold, they are all considered as ground interference areas, which are directly removed, and then use The opening operation in the morphological operation removes the noise, the closing operation is used to fill the speckle in the obstacle, and the Graham's Scan method is used to perform the convex hull operation on the obstacle to obtain information such as the position and size of the obstacle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More