Coupling manipulator capable of grabbing object adaptively
An adaptive, manipulator technology, applied in the field of coupled manipulators, can solve the problems of complex structure, complex control, and easily damaged objects, and achieve the effect of compact structure, simple and reliable control, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Below in conjunction with embodiment and attached Figures 1 to 8 The present invention is further described.
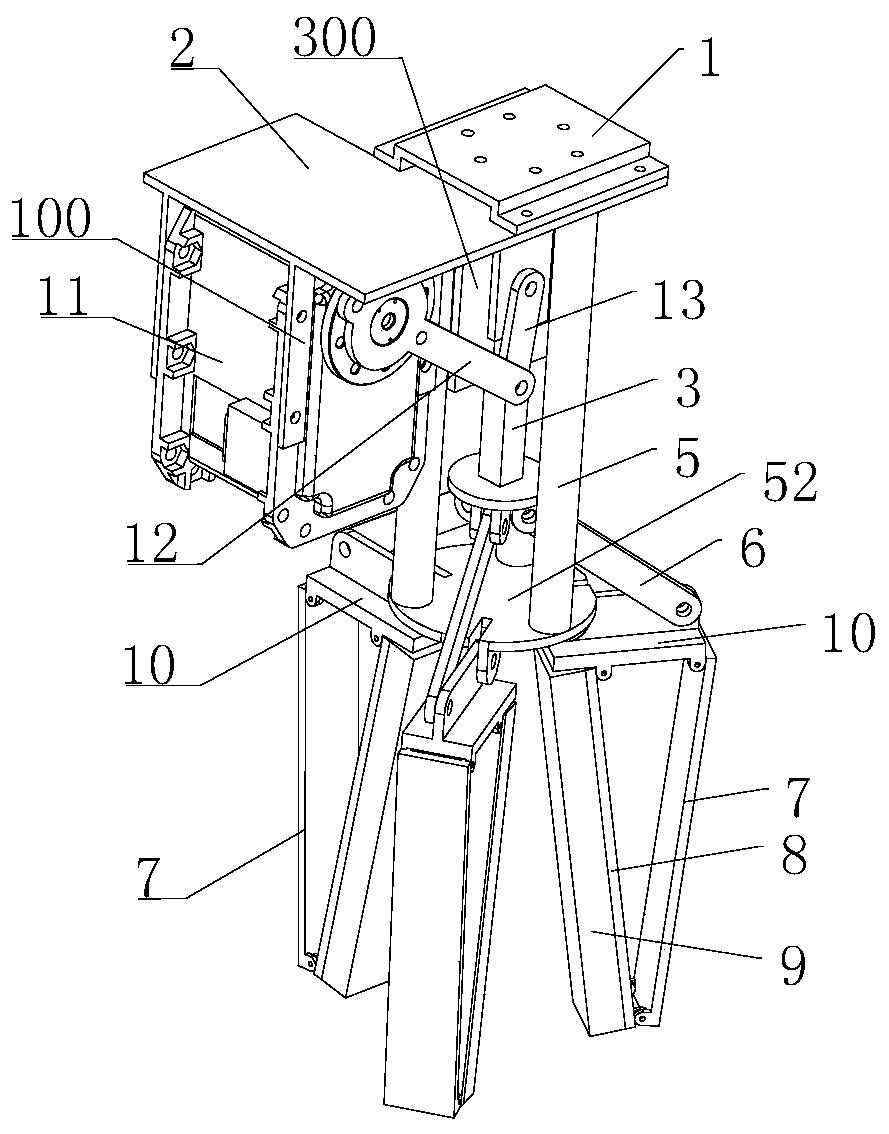
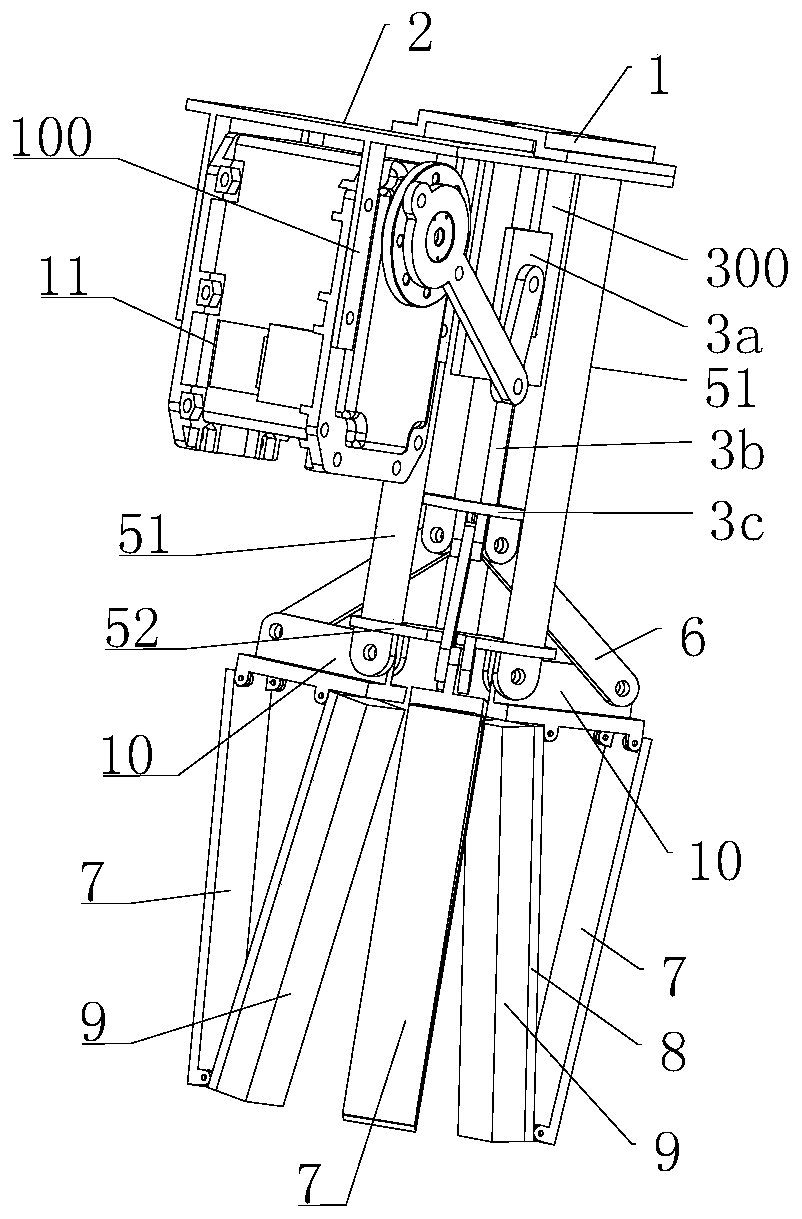
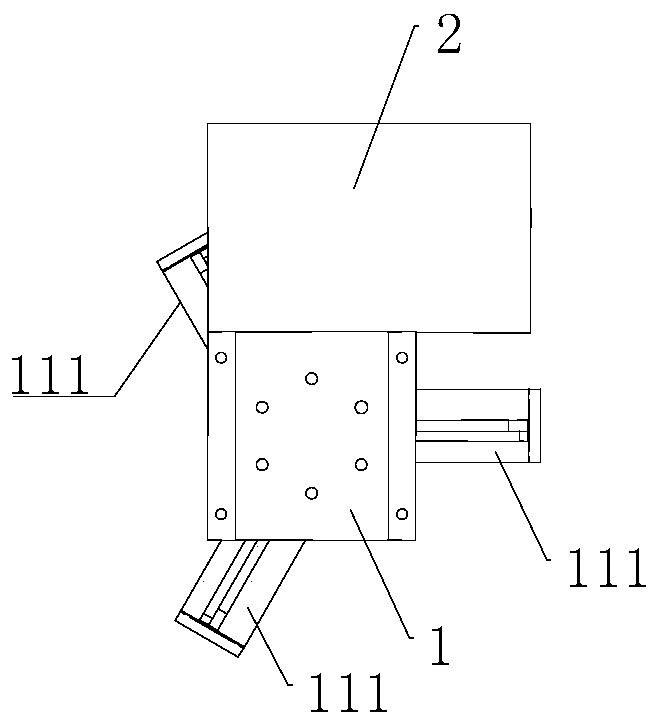
[0033] A coupling manipulator for adaptively grabbing objects involved in the present invention, such as figure 1 , 2 As shown, it includes a base, a driving device, a bracket, a transmission mechanism, and a finger structure, and the manipulator can be connected to a robot arm or a mechanical arm through the base 1 . The base is fixed on the base 1, and the bracket 5 is fixed on the base. Such as Figure 5 As shown, the base includes a mounting frame 2 and a sliding rail 300, the sliding rail 300 is vertically arranged to the mounting frame 2, and the two are fixedly connected. The driving device is a steering gear 11, and the present invention adopts a steering gear 11 to drive, and the mounting frame 2 is provided with a steering gear base, and the steering gear base is parallel to the slide rail 300 and is located at The stand 100 on the same side as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com