

Robot trajectory tracking auto-disturbance rejection control method based on model-free outer loop compensation
A technology of active disturbance rejection control and active disturbance rejection controller, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as difficult establishment of system model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
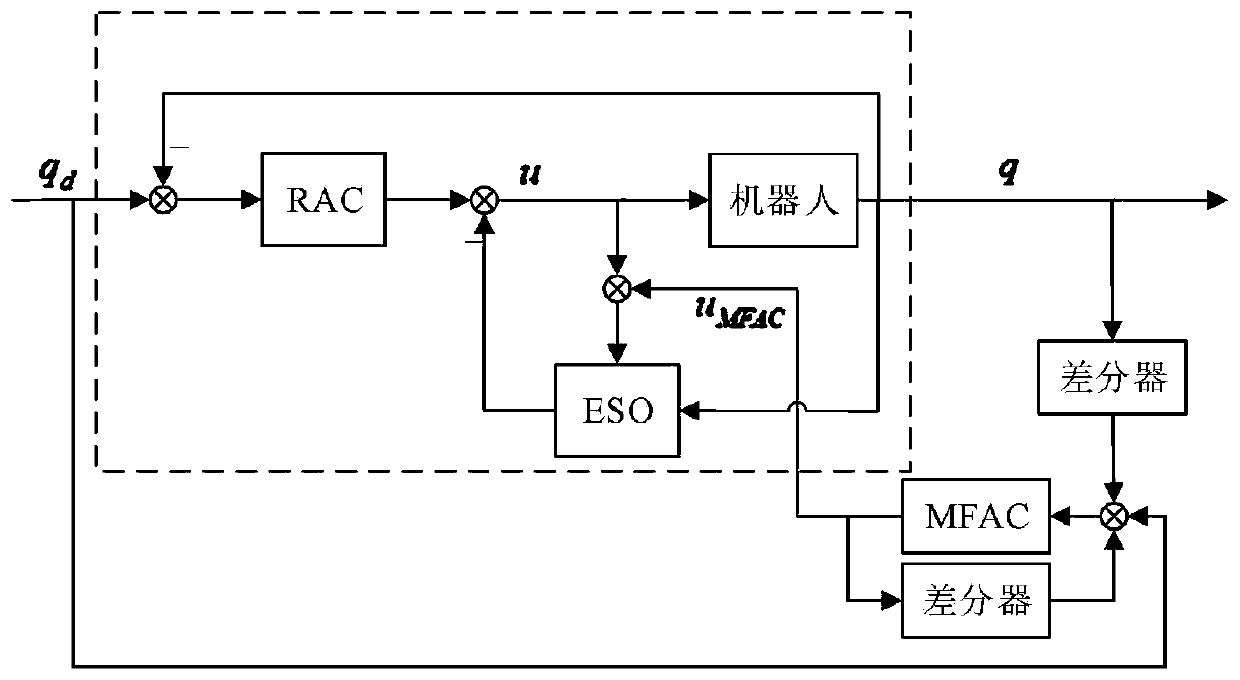
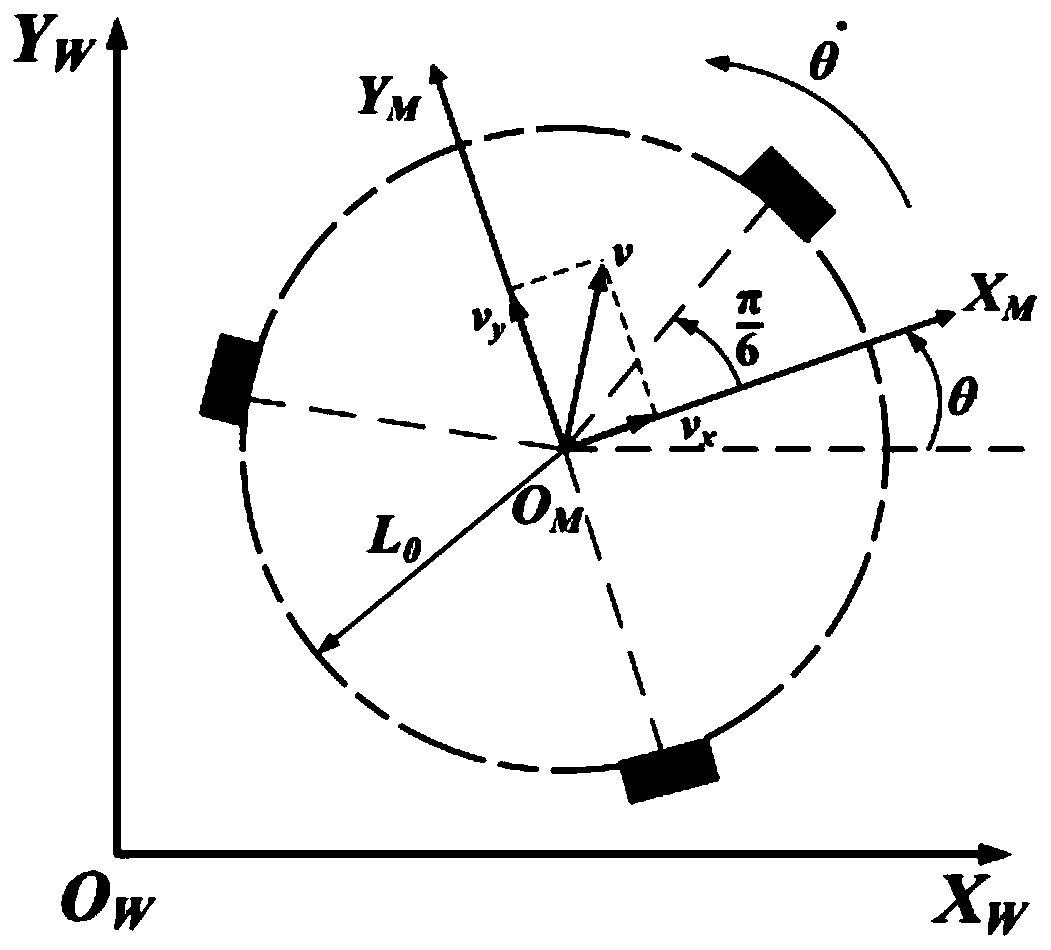
[0055] Active disturbance rejection control method for omnidirectional mobile robot trajectory tracking based on model-free outer loop compensation. The scheme first gives the dynamic model of the omnidirectional mobile robot system; then uses the extended state observer to estimate the uncertainty of the dynamic model and the external disturbance of the system; then designs the controller according to the analytical acceleration control method, and estimates the observer The disturbance information is added to the controller; finally, the model-free adaptive control based on the compact format is added to the outer loop of the ADRC system that has been established.
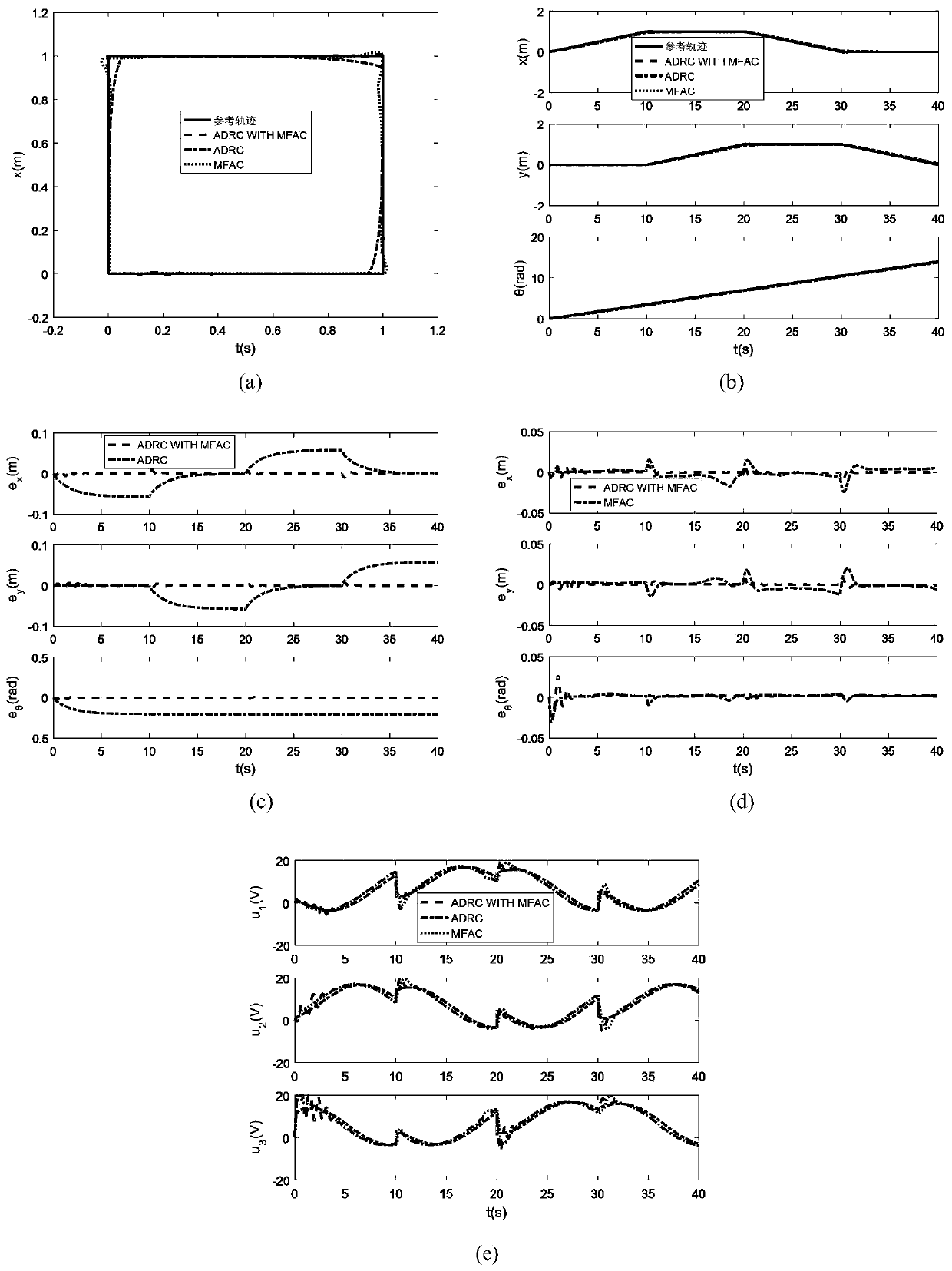
[0056] The invention combines a model-based control method with a model-free control method, so that the quality of the control system can be improved without destroying the original control system under the condition that the model cannot be accurately modeled. In other words, ADRC and model-free adaptive contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More