

AGV positioning method for multiple sensors
A positioning method and multi-sensor technology, applied in two-dimensional position/channel control and other directions, to achieve the effects of easy installation, cost reduction, and simple algorithm processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
[0047] All features disclosed in this specification, except mutually exclusive features, can be combined in any way.
[0048] Any feature disclosed in this specification (including any appended claims, abstract and drawings), unless expressly stated otherwise, may be replaced by alternative features which are equivalent or serve a similar purpose. That is, unless expressly stated otherwise, each feature is one example only of a series of equivalent or similar features.
[0049] A multi-sensor AGV positioning method, said method comprising the following steps:
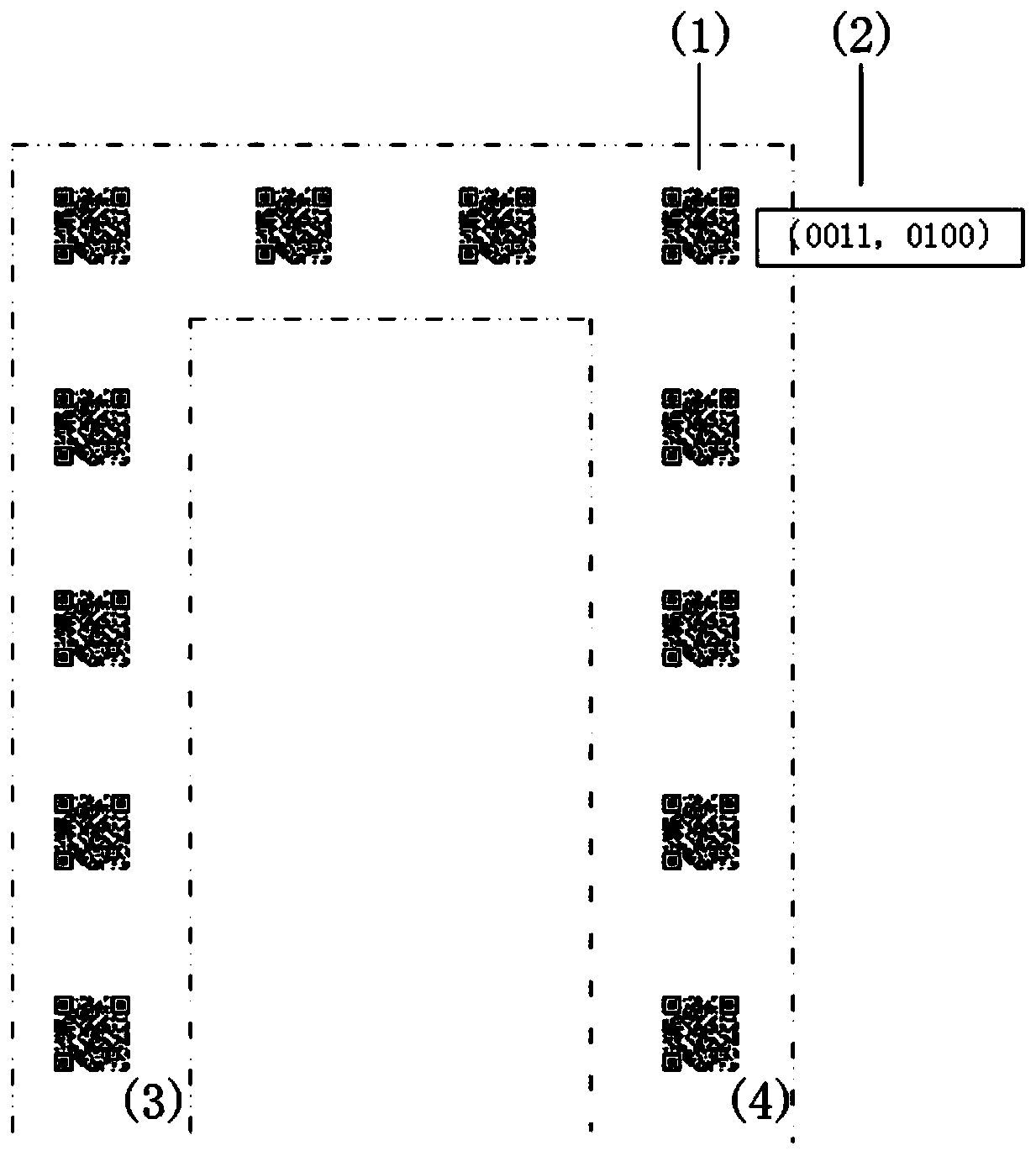
[0050] Step 1: Arrange QR codes as visual beacon nodes on the travel path of the AGV.
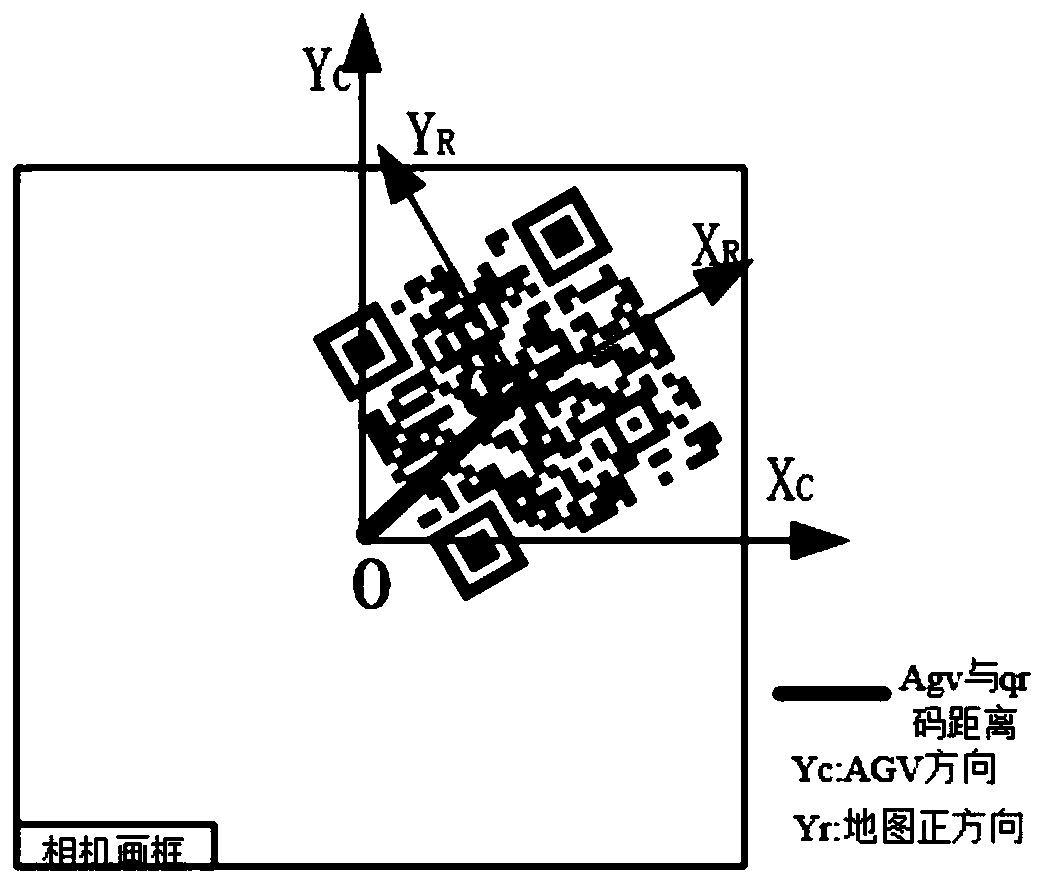
[0051] Step 2: Collect the QR code image information arranged on the AGV travel path through the ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More