

Model error compensation method for ultra-high-velocity aircraft autonomous navigation system
An autonomous navigation system and model error technology, applied to integrated navigators, navigation calculation tools, instruments, etc., can solve problems such as GNSS signal interruptions and inaccurate dynamic models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
[0088] The simulation parameters are given as follows:
[0089] 1) The sensitivity error matrix of the geomagnetic sensor is: The non-orthogonal error matrix is: The bias error vector (unit: nT) is: b o =[900 850 750]; hard magnetic error vector (unit: nT) is: b n =[700 750 800]; The soft magnetic error matrix is: The standard deviation of the measurement random error is: 10nT; the initial estimated value of the geomagnetic sensor system error is taken as: [0,0,0];
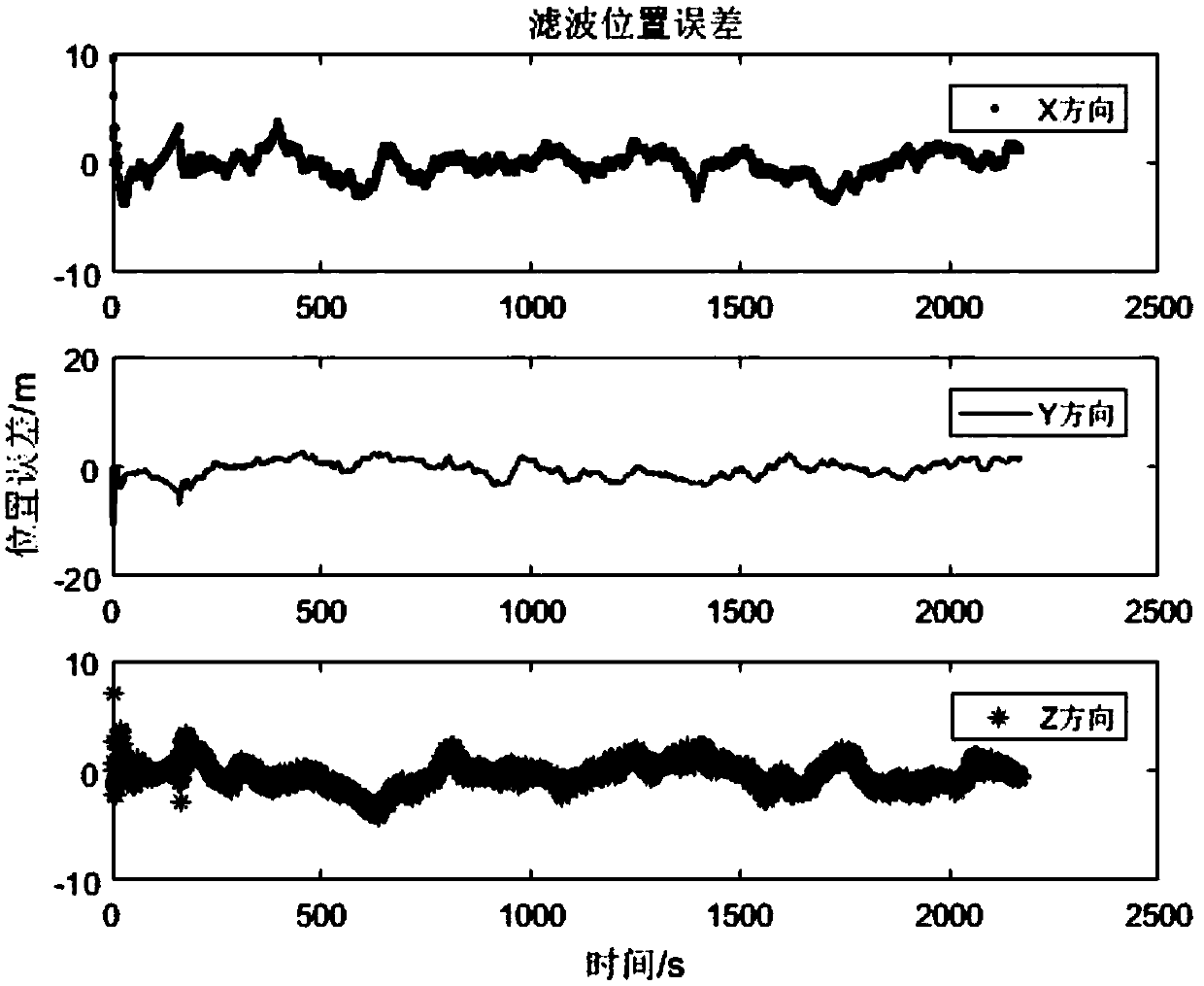
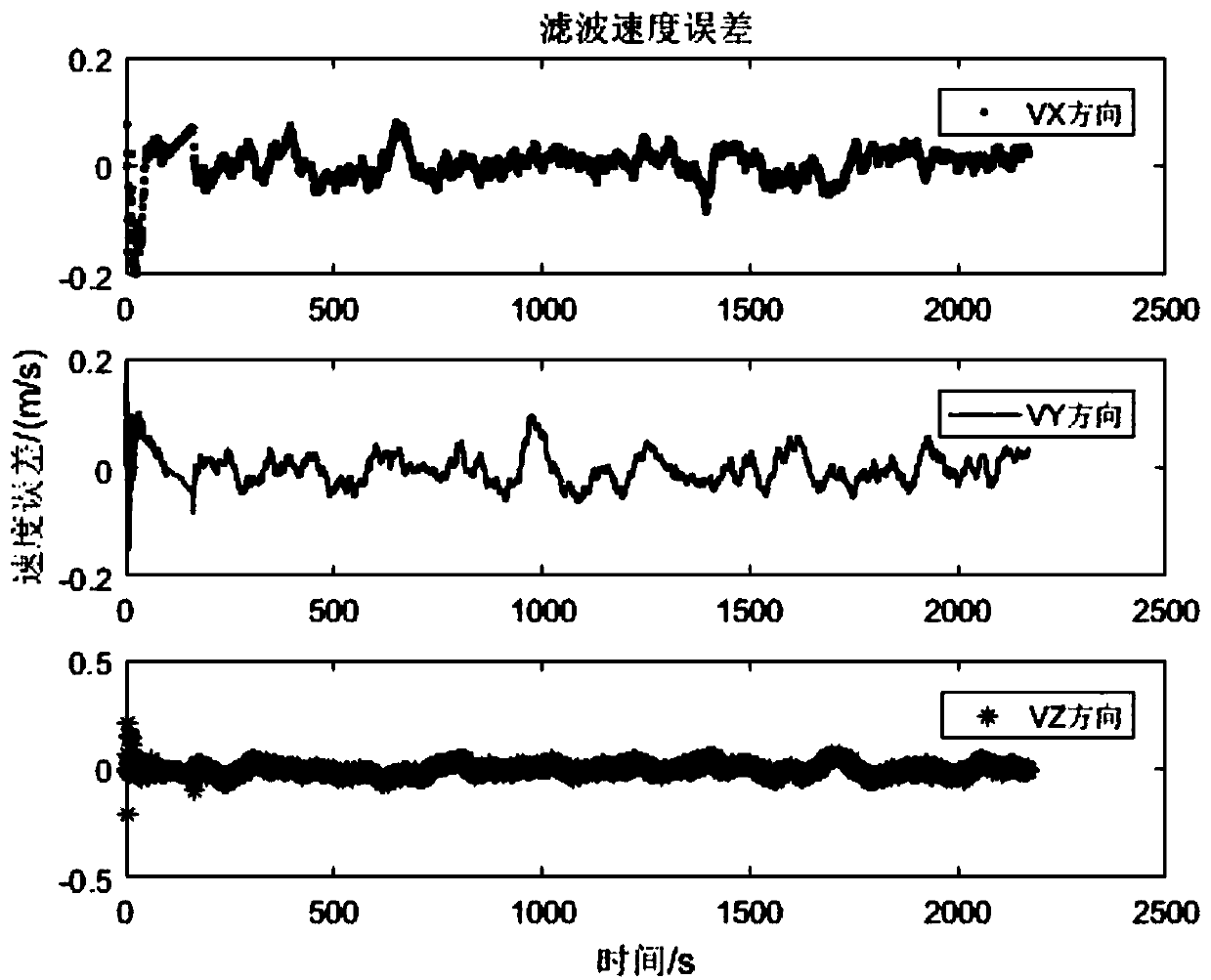
[0090] 2) The GNSS positioning error is 10 meters, and the speed error is 0.1 meters per second;
[0091]3) Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More