

An unmanned aerial vehicle visual target tracking method based on scale adaptive kernel correlation filtering
A kernel-related filtering and scale-adaptive technology, applied in computer parts, image data processing, instruments, etc., can solve problems such as long running time, inability to meet UAV tracking requirements, and complex UAV target tracking algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
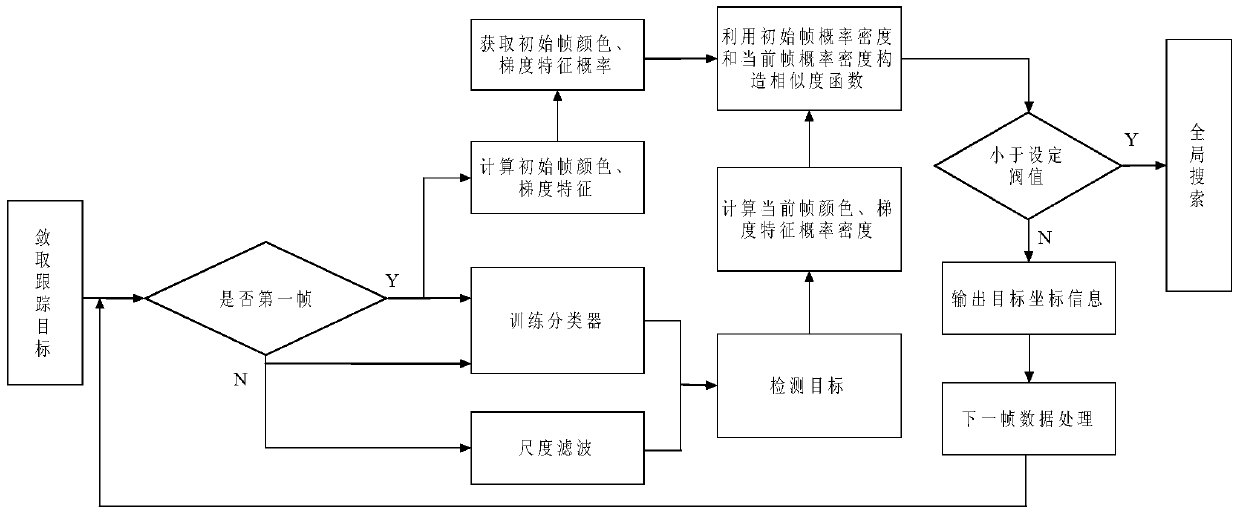
[0064] Such as figure 1 As shown, a UAV visual target tracking method based on scale-adaptive kernel correlation filtering, including steps:
[0065] The first step is to select the tracking target to obtain the first frame of data, and use the first frame of data to calculate the initial probability density of the target color and target gradient, and at the same time use the first frame of data to train the classifier and detect the center position of the target using the kernel correlation filter algorithm ;
[0066] The method of calculating the color probability density of the tracking target is as follows:
[0067] Divide the color information of the target area into 16*16*16 levels in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More