

Mechanical arm joint with controllable rigidity
A technology of robotic arms and joints, applied in the field of robotics, can solve the problems of low motion accuracy, inconvenient control, complex structure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
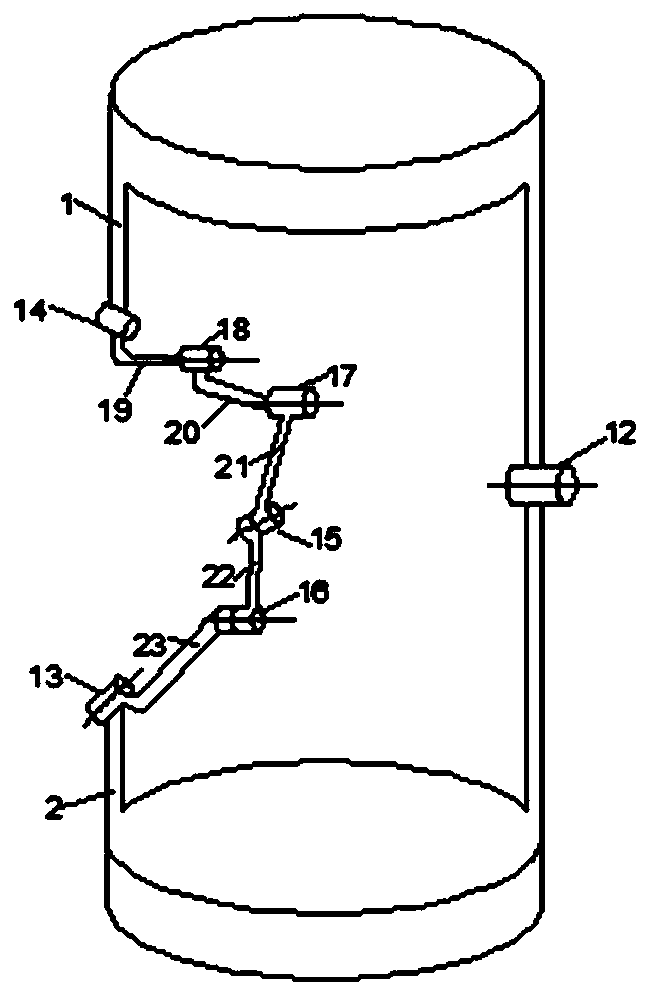
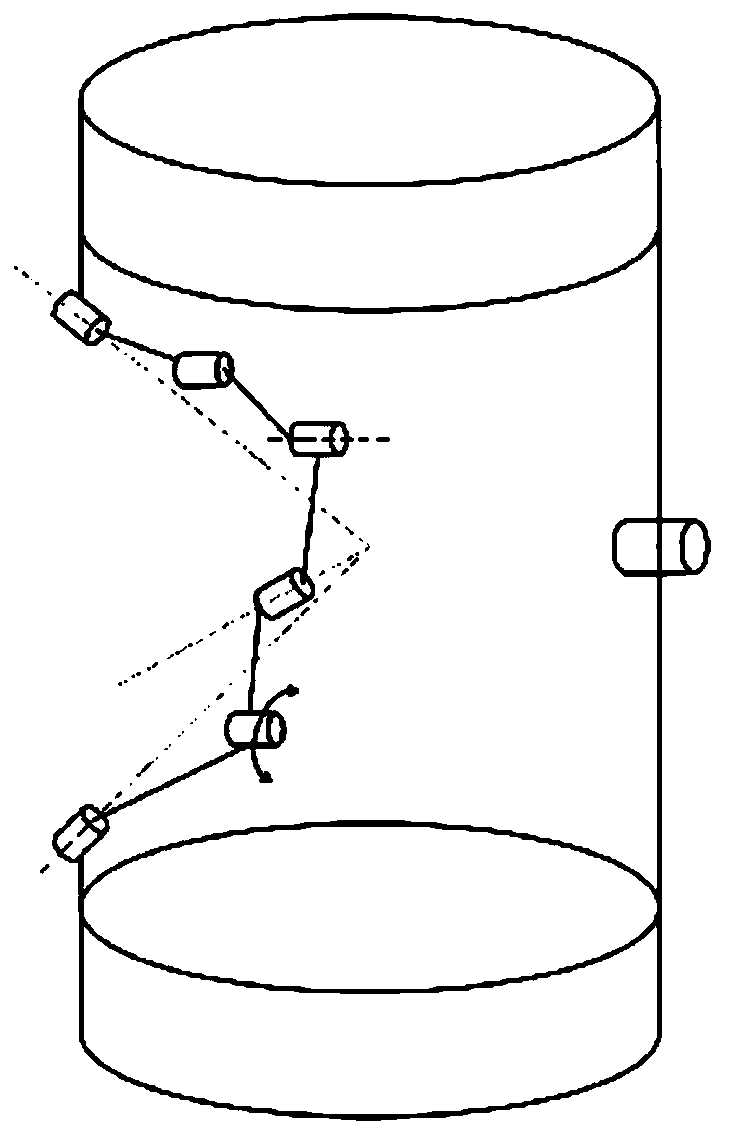
[0027] A manipulator joint with controllable stiffness, its structure is as follows figure 1 As shown, it includes an upper platform 1, a lower platform 2, and a first kinematic branch chain and a second kinematic branch chain connected between the upper platform and the lower platform.
[0028] The first kinematic branch chain includes a first revolving pair 13, a second revolving pair 16, a third revolving pair 15, a fourth revolving pair 17, a fifth revolving pair 18 and a sixth revolving pair 14; the sixth revolving pair 14, the seventh revolving pair The swivel pair 12 is connected with the upper platform 1 , and the first swivel pair 13 and the seventh swivel pair 12 are connected with the lower platform 2 . The second kinematic branch chain includes the fifth and seventh revolving pairs 16; the fifth revolving pair 18 is connected with the first revolving pair 14 through the first connecting rod 19, and the fifth revolving pair 18 is connected with the sixth revolving p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More