

Method for judging the trapping of cleaning robot
A technology for cleaning robots and robots, applied in machine parts, manual sweeping machines, etc., can solve problems such as getting out of trouble, inability to distinguish wheels, and long time, and achieve the effects of easy implementation, good real-time performance, and simple and effective judgment process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
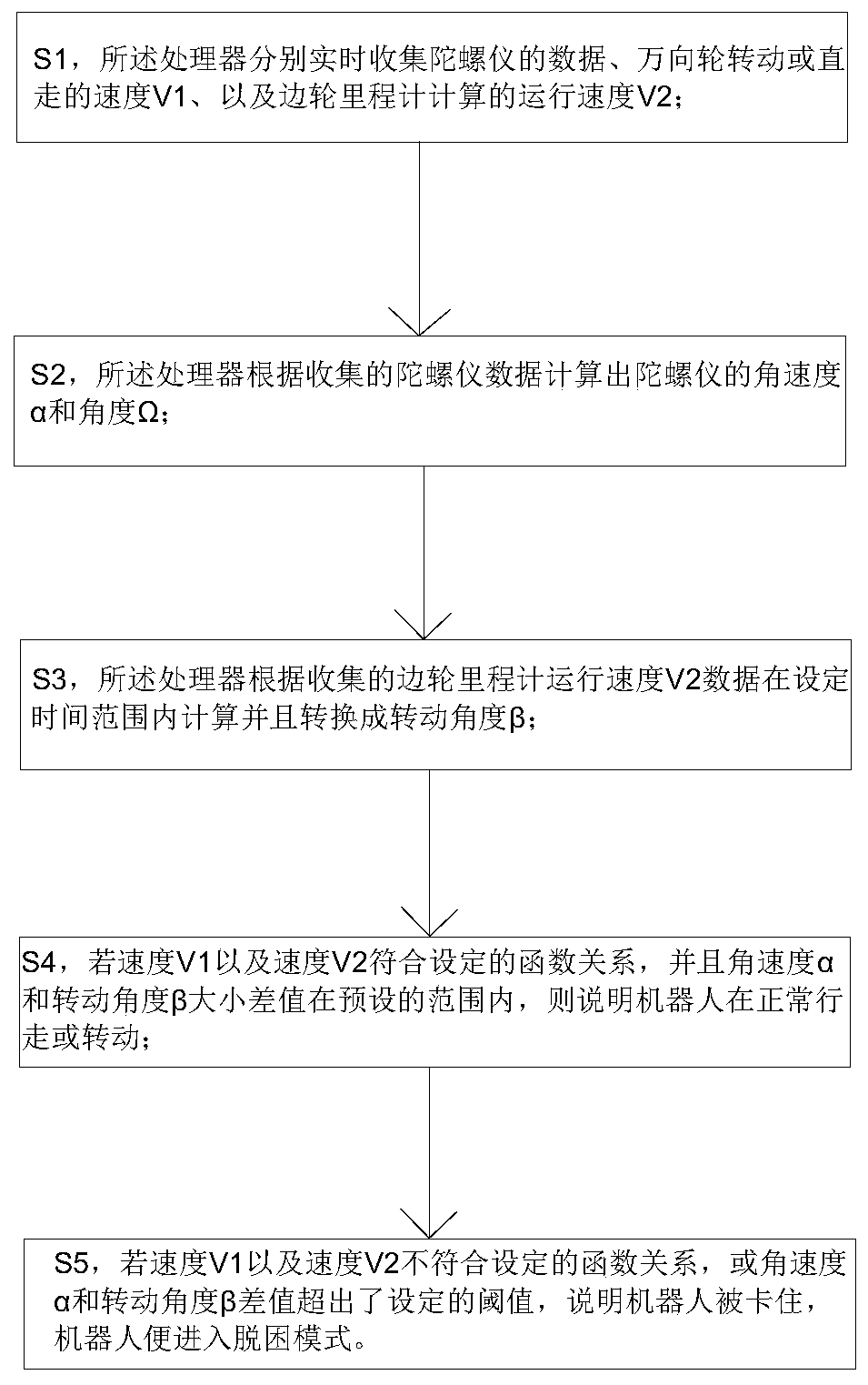
[0032] When the robot is stuck and fixed in place, within 5 seconds after the action, the side wheel odometer detects that the value V2 of the speed of the driving rollers on both sides is relatively large, and the rotation angle β of the driving rollers is not 0, but the speed of the universal wheel V1 is 0, and the angular velocity α detected by the gyroscope is basically 0. At this time, the speed V1 of the universal wheel and the speed V2 of the side wheel odometer do not conform to the set functional relationship, and the angular velocity α of the gyroscope and the side wheel odometer If the rotation angle β exceeds the preset threshold, it is judged that the robot is in a trapped state, and the robot needs to enter the escape mode.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More