

Anti-slip control method for distributed drive electric vehicles based on combination of wheel speed and wheel acceleration
A technology of electric vehicles and control methods, which is applied in the field of vehicle control, can solve problems such as the deterioration of the slip rate control effect, the error of vehicle speed estimation, and the performance decline of dynamic algorithms, so as to improve the precision of anti-skid control, improve the accuracy, and improve the estimation of vehicle speed The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
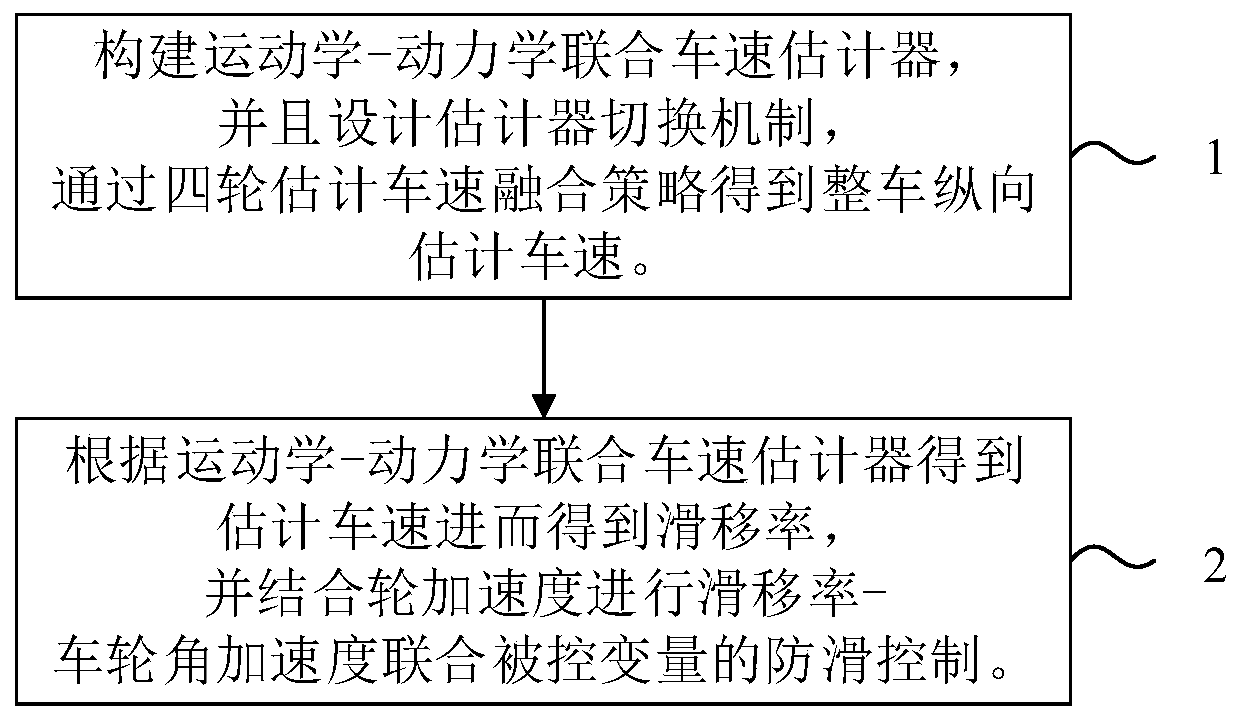
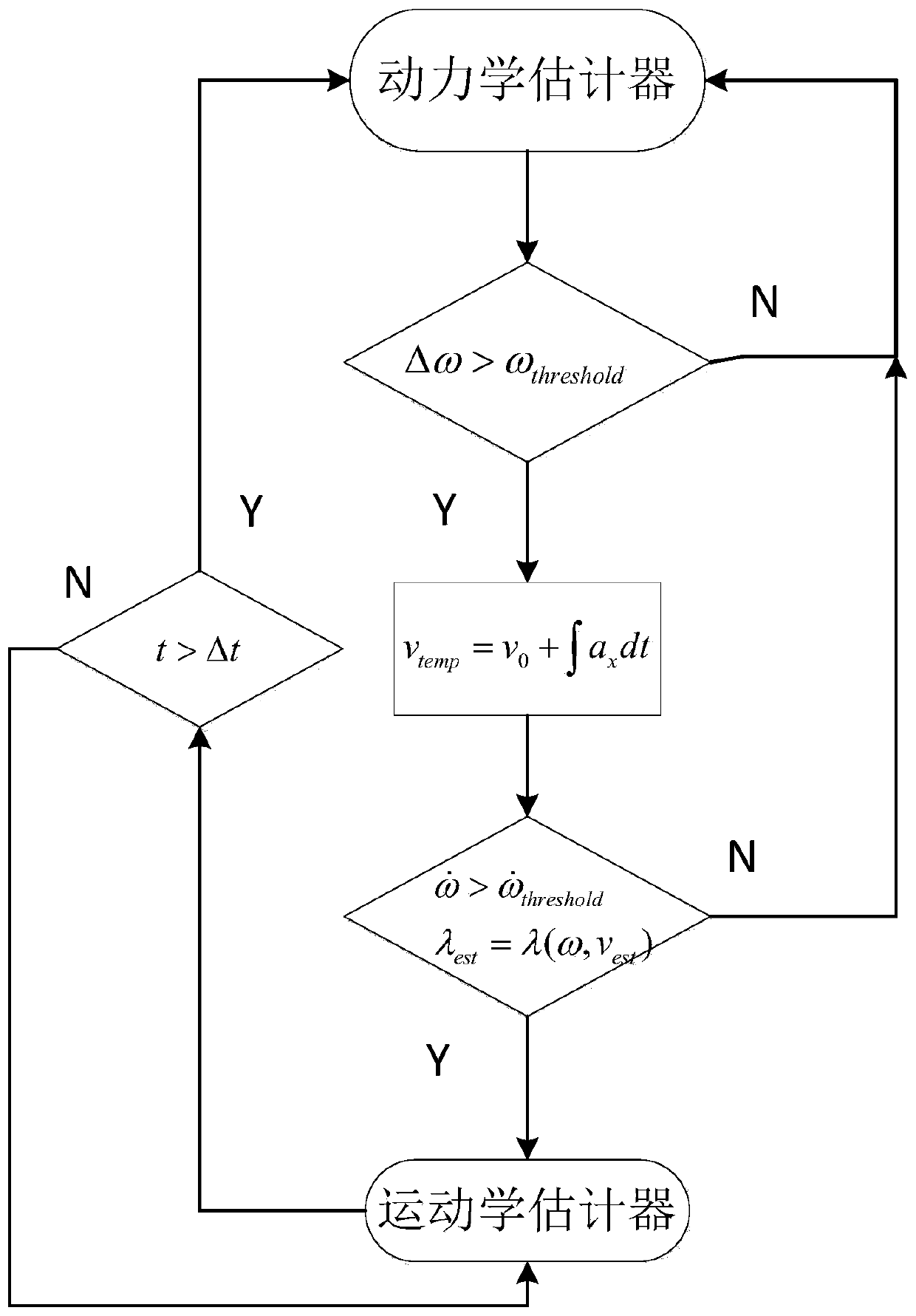
[0058] In this embodiment, the anti-skid control process implemented according to the above method is as follows Figure 5 As shown, specifically:
[0059] Step 1. Construct a kinematics-dynamics joint vehicle speed estimator, and design the estimator switching mechanism, and obtain the estimated vehicle speed through the four-wheel estimated vehicle speed fusion strategy. In this embodiment, based on the dynamics of the wheel slip rate, the dynamics and Kinematics integrated slip rate controller, and the switching conditions and specific switching mechanism between the two are given. When the wheel is in the range of small longitudinal slip rate, the slip rate estimation method adopts the dynamic estimation method based on the tire model. When the wheel is in a large range of longitudinal slip rate, the slip rate estimation method adopts the kinematics estimation method. And design a switching mechanism based on the wheel acceleration as the main criterion, supplemented by ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More