

An Error Model Predictive Control Method Based on Kinematics Modeling of Omnidirectional Mobile Robot
A technology of robot kinematics and kinematics model, applied in non-electric variable control, position/direction control, two-dimensional position/channel control, etc., can solve the problems of reducing system control performance and stability, and achieve strong carrying capacity , good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
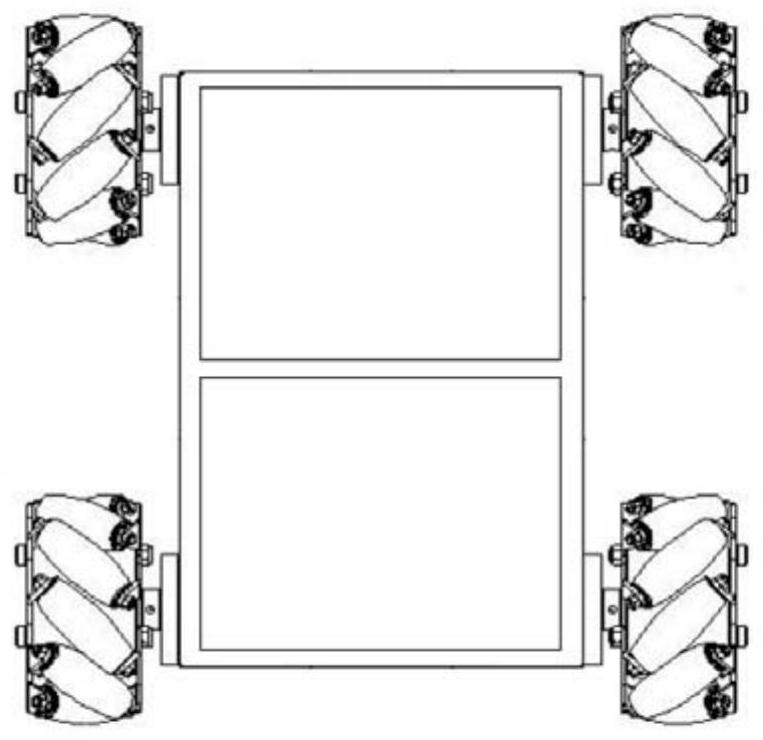
[0130] The Mecanum wheel is an omnidirectional steering wheel with superior performance and wide application, which consists of small rollers evenly distributed around the central hub. The Mecanum wheel has three degrees of freedom, namely rotation about the wheel axis, rotation about the roller axis, and rolling between the wheel and the ground. The rotation of the wheels is driven by electric motors, while the rollers are driven by friction on the ground. Therefore, when the motor drives the wheel to rotate, the wheel will advance in a direction perpendicular to the drive shaft, while the rollers surrounding the wheel will advance along their respective axes.
[0131] An error model predictive control method based on kinematic modeling of an omnidirectional mobile robot, the method includes the following steps:
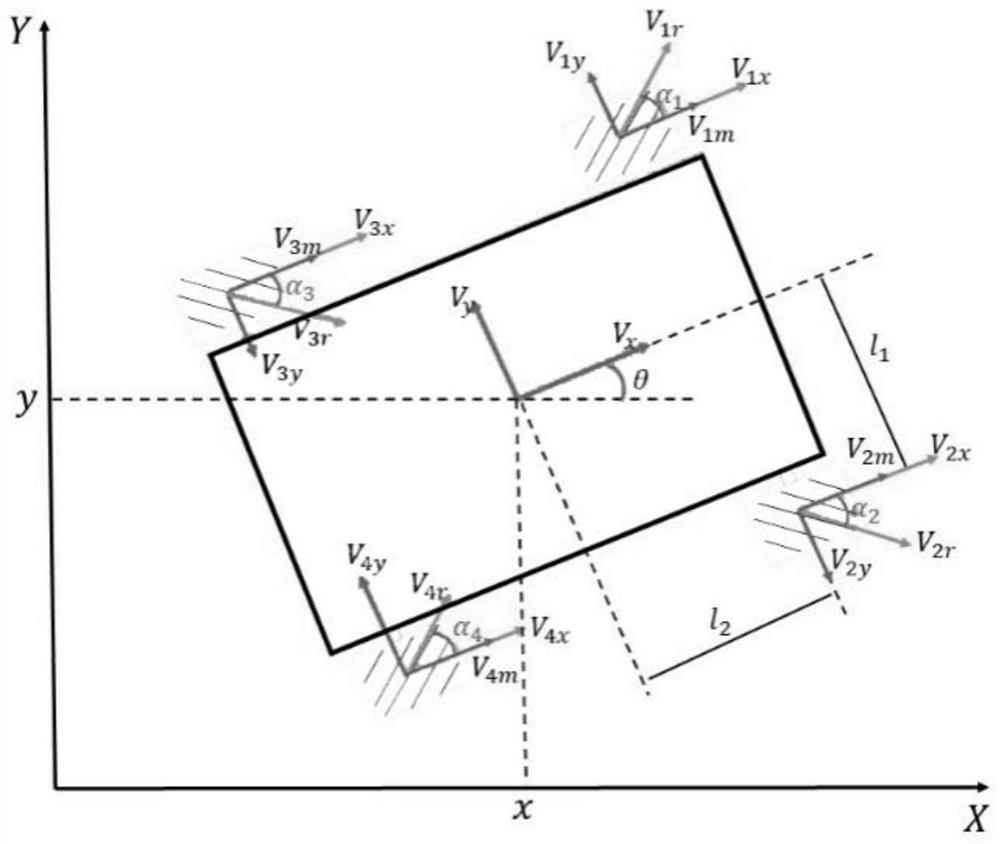
[0132] S11. Establish a velocity-constrained kinematics model between the four Mecanum wheels of FM-OMR;
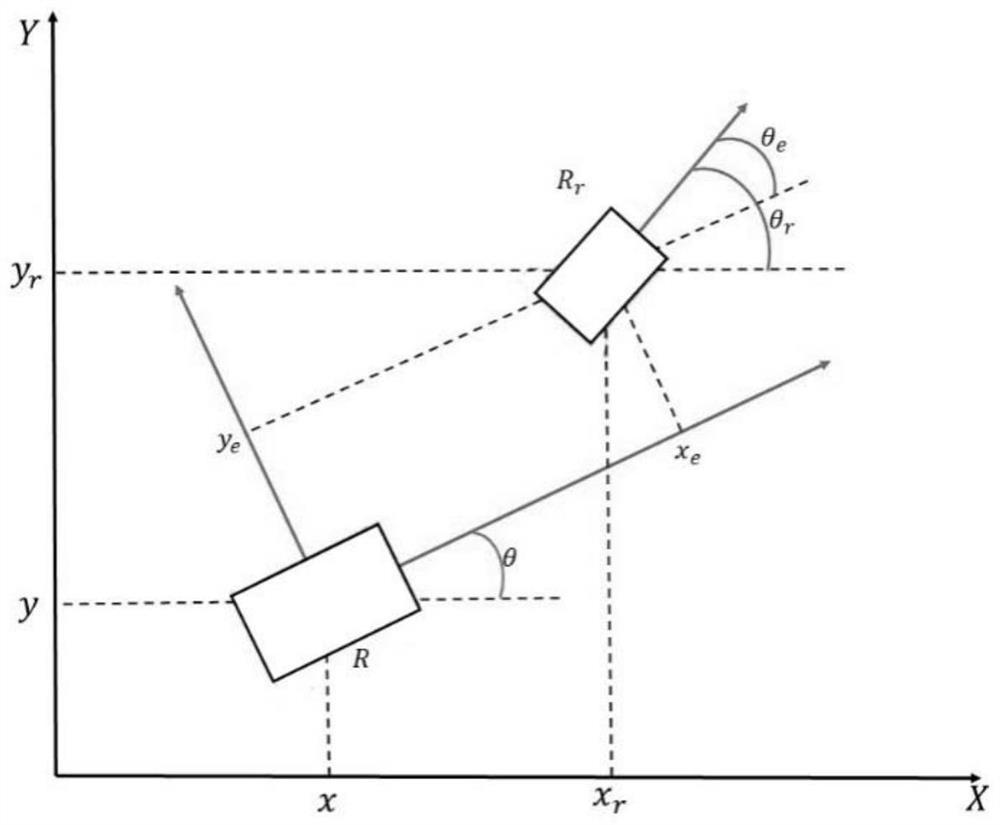
[0133] S12, establish a tracking error kinematic model ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More