

A method and device for generating a high-precision map
A high-precision, map technology, used in image enhancement, image analysis, image data processing, etc., can solve the problems of inability to achieve high-precision centimeters, high cost, and large errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Preferred embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although preferred embodiments of the present disclosure are shown in the drawings, it should be understood that the present invention can also be implemented in various other forms and should not be limited to the specific embodiments described below. These specific embodiments are provided here to make the disclosure of the present invention more thorough and complete, and to fully convey the scope of the disclosure of the present invention to those skilled in the art.
[0028] The word "exemplary" is used herein to mean "serving as an example, illustration, or illustration." Any aspect described herein as "exemplary" should not be construed as preferred or advantageous over other aspects.
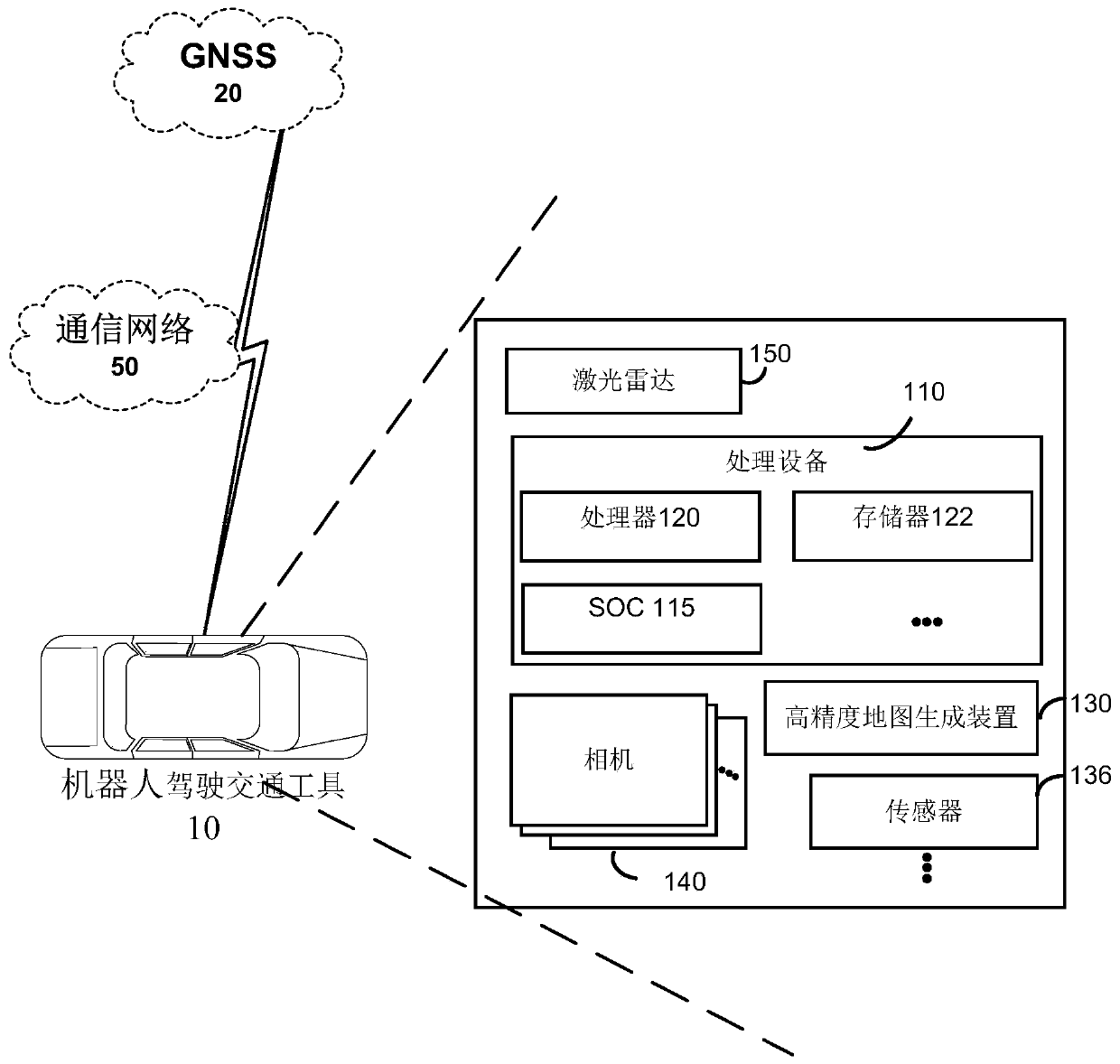
[0029] As used herein, the terms "robotically driven vehicle" and "drones" and "unmanned vehicles" refer to various types of vehicles including on-b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More