

Collaborative robot joint with force perceiving function
A technology of robot joints and perception functions, applied in the field of robots, can solve problems such as poor detection accuracy, inaccuracy, and difficulty in robot stiffness performance, and achieve the effect of simple structure, small quality and volume, and compact overall structure design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
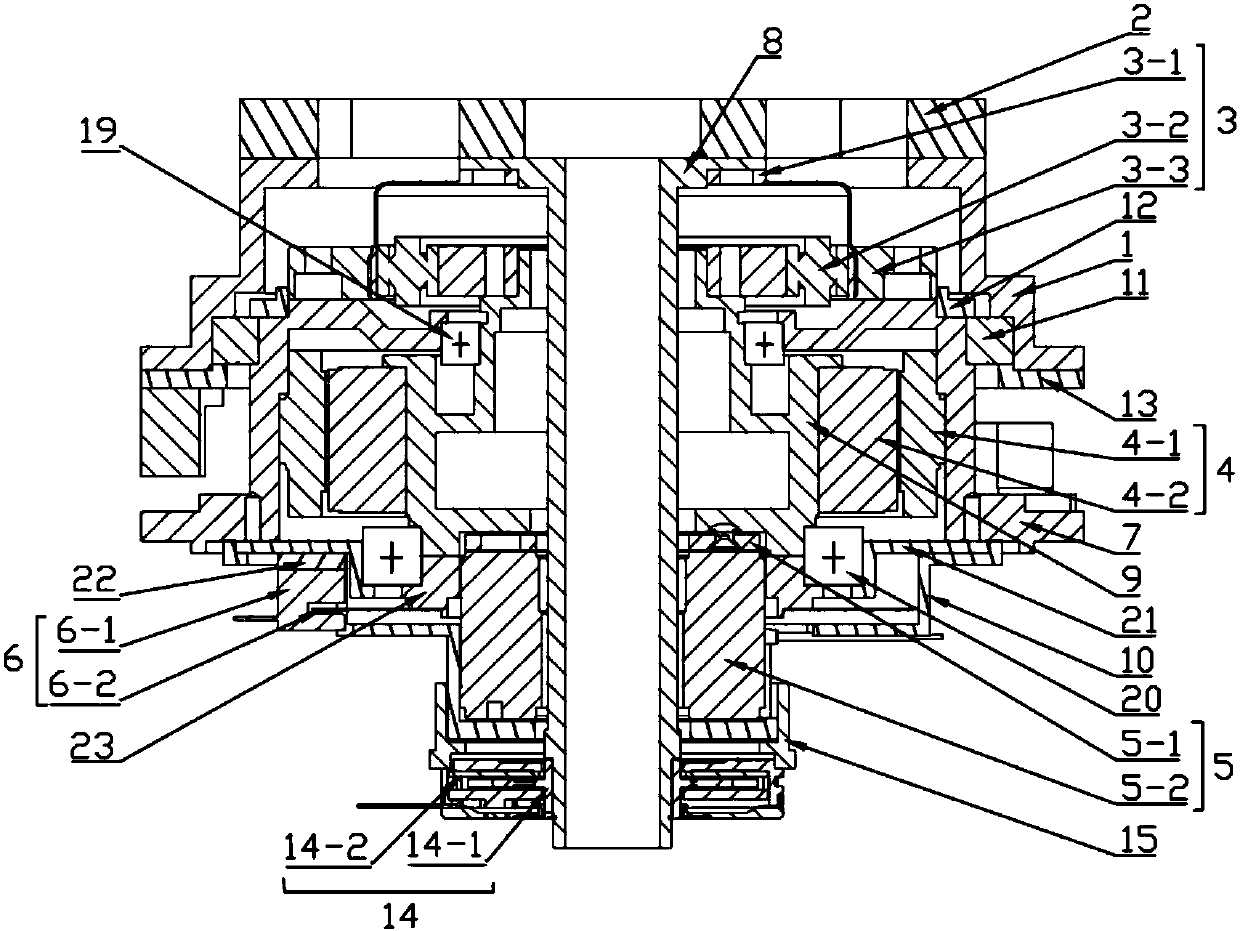
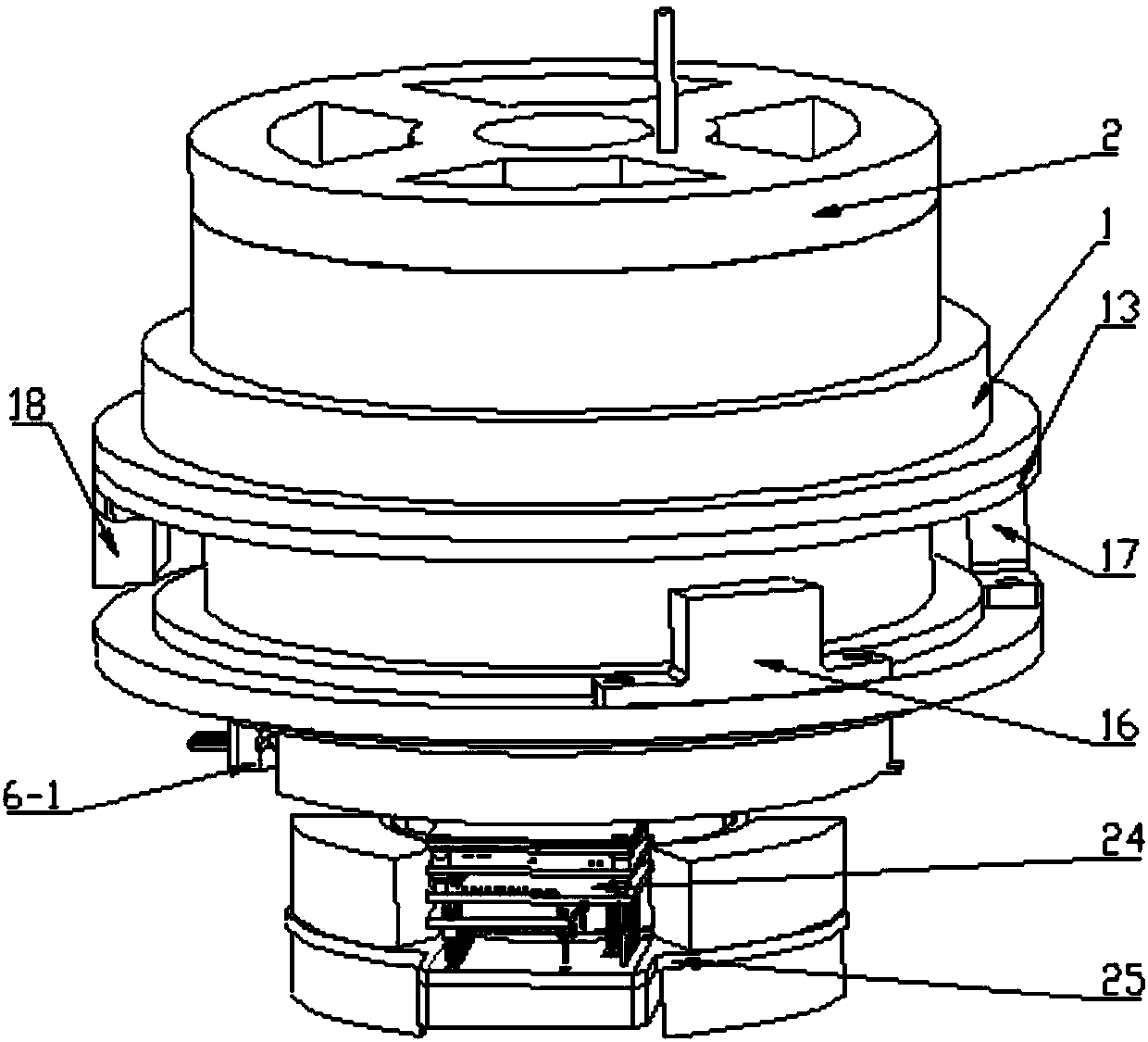
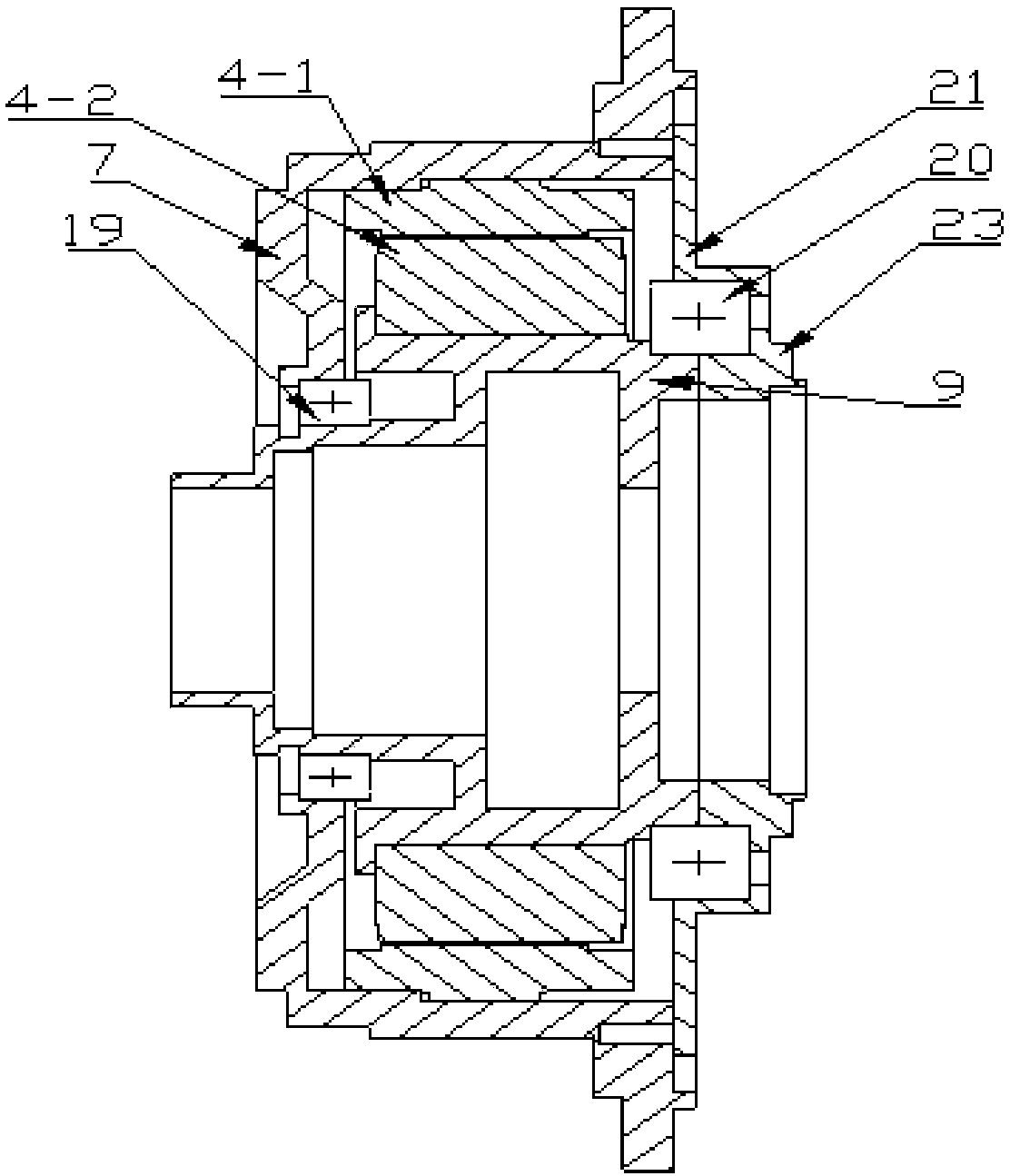
[0032] Such as Figure 1-2 As shown, a collaborative robot joint with force sensing function provided by the present invention includes an output flange 1, a torque sensor 2, a harmonic reducer 3, a frameless direct drive torque motor 4, an input flange 7 and a threading pipe 8 , wherein the harmonic reducer 3 and the frameless direct drive torque motor 4 are accommodated in the cavity formed by the output flange 1 and the input flange 7, the output flange 1 and the input flange 7 can rotate relatively, the harmonic reducer 3 and the frameless direct drive torque motor 4 are set on the threading pipe 8, the output end of the frameless direct drive torque motor 4 is connected to the threading pipe 8 through the harmonic reducer 3, and the threading...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More