

Vehicle trajectory network interactive predicting method for movement states of multiple vehicles
A motion state and prediction method technology, applied in the field of intelligent networked vehicle environment perception, can solve the problems of application limitations, not considering the influence of the prediction target, and not considering the independent prediction of a single vehicle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
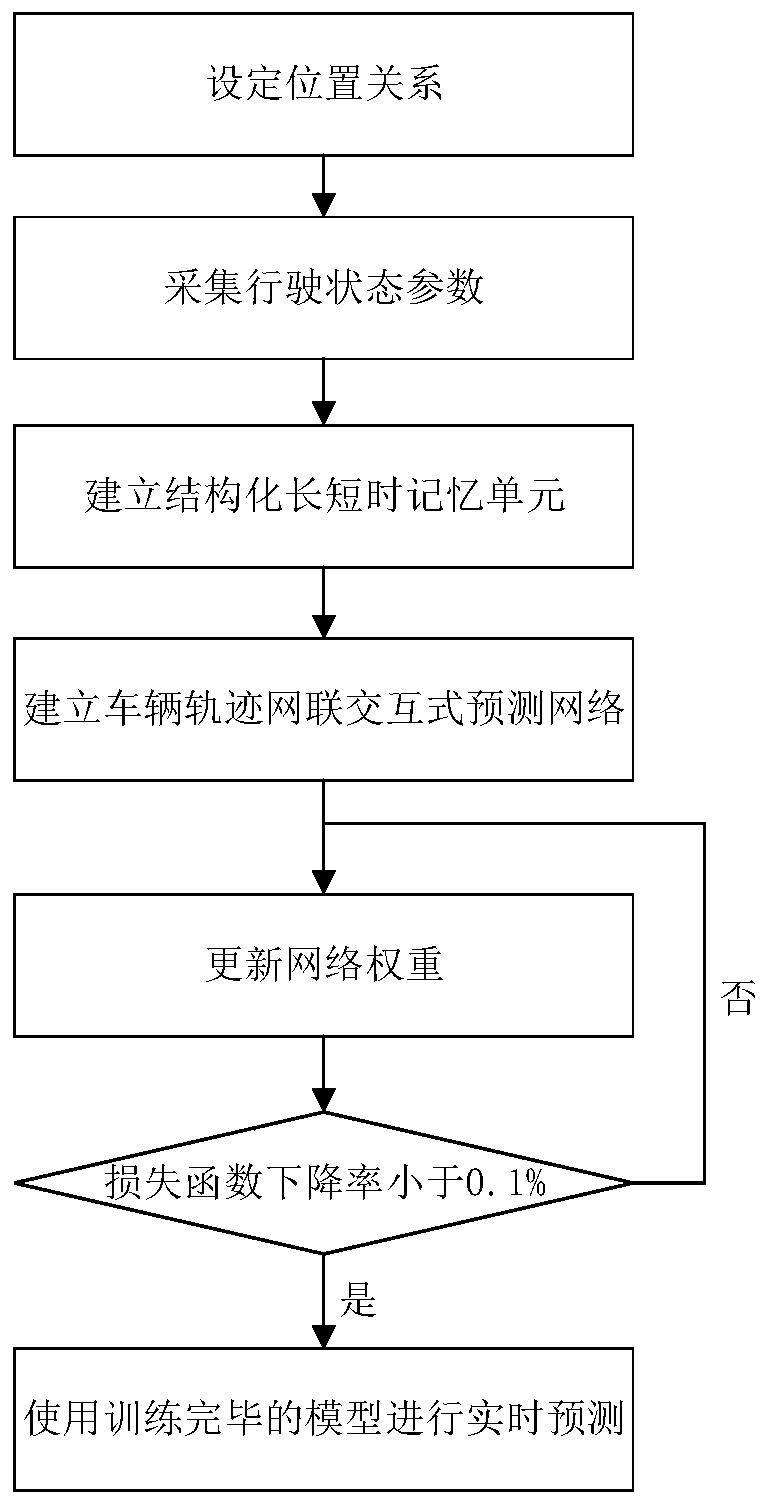
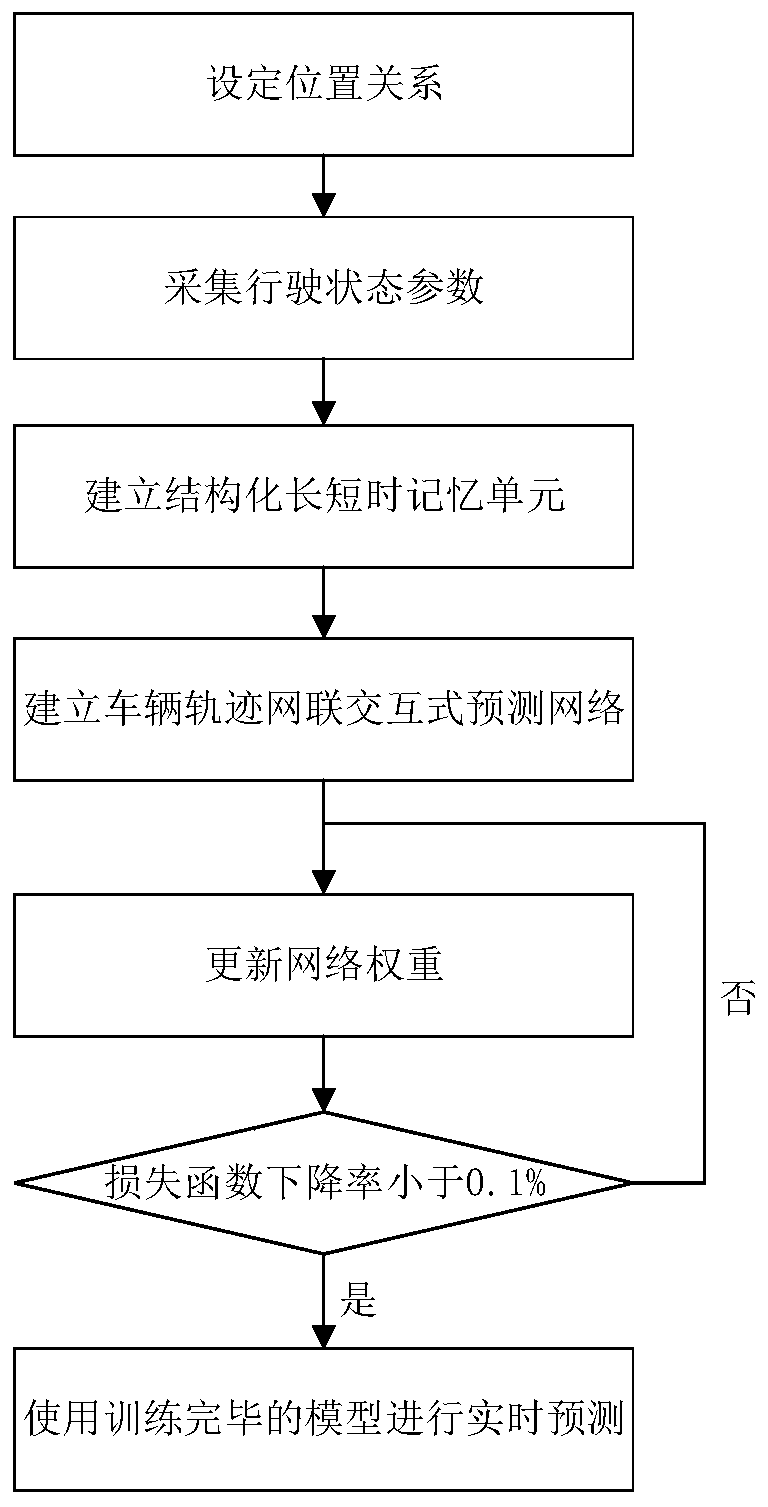
[0060] The multi-vehicle motion state proposed by the present invention is a network-connected interactive prediction method for vehicle trajectories, the flow chart of which is as follows figure 1 shown, including the following steps:
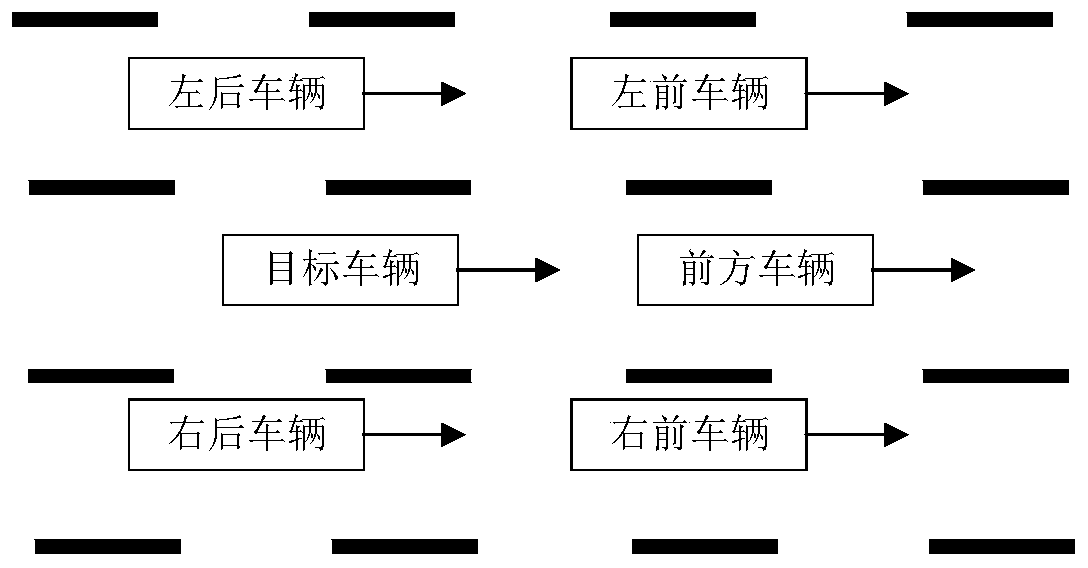
[0061] (1) It is set that the predicted target vehicle and the environment vehicle are distributed in three adjacent lanes, and the target vehicle is in the middle lane. When the target vehicle crosses the middle lane line, the positional relationship between the target vehicle and the environment vehicle is replaced by the new The three adjacent lanes still keep the target vehicle in the middle lane, and the specific spatial position relationship is as follows figure 2 Shown:
[0062] (1-1) The target vehicle is located in the middle lane;
[0063] (1-2) The vehicle in front is located in the middle lane and in front of the target vehicle;
[0064] (1-3) The left front vehicle is located in the left lane and in front of the target vehicle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More