

Tracking filtering method based on data fusion
A technology of data fusion and tracking filtering, applied in the field of tracking filtering, can solve problems such as error in filtering results, and achieve the effect of improving estimation accuracy and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
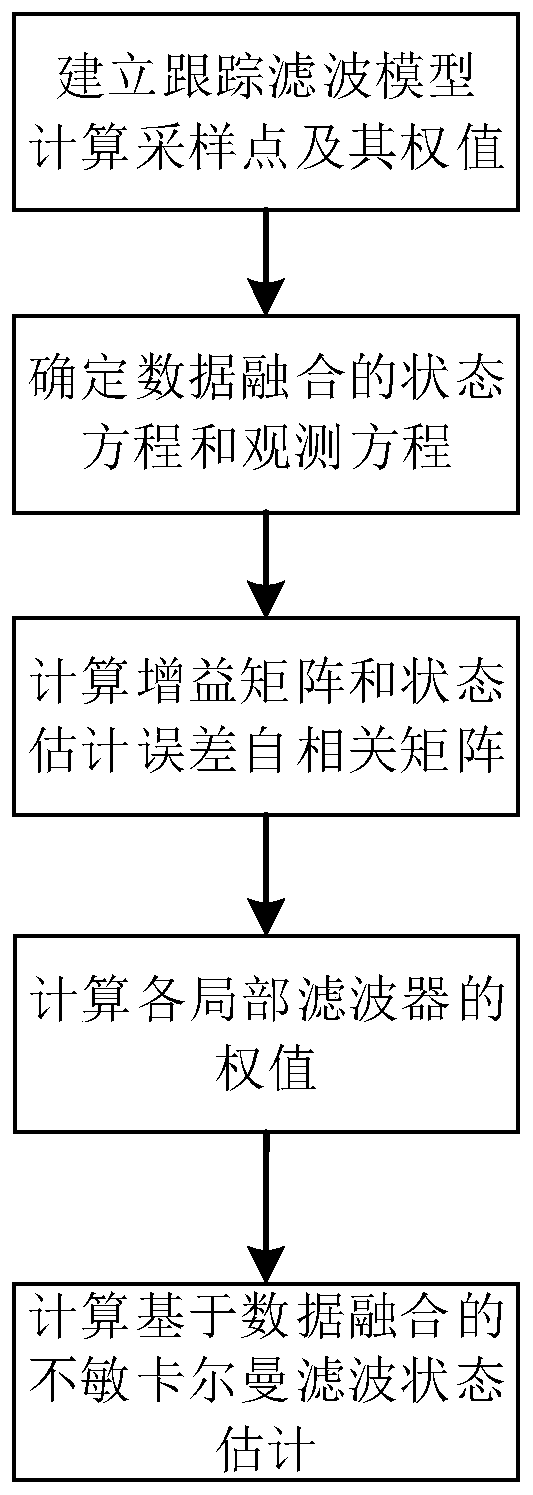
[0025] The present invention comprises the following steps:
[0026] a) First calculate (2N+1) Signa sampling points χ i and the corresponding weight w i :
[0027]
[0028]
[0029] Among them, the parameter λ=α 2 (N+η)-N, N represents the dimension of the state vector x, represents the mean value of x, P x Indicates the covariance of x, λ is the set scale factor, η is generally 0, α indicates the degree of dispersion of the sampling point to the mean, and takes a smaller value, such as 0.001, β indicates the prior information of the state vector, and the maximum value of β The best value is 2, and Represent the mean value of the first sampling point and the weight of the co-prevention difference, and Respectively represent the ith sampling point χ i T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More