

Robot motion control method and system based on human motion intention detection
A technology of robot movement and movement intention, applied in passive exercise equipment, sensors, diagnostic recording/measurement, etc., can solve problems such as the inability to quickly detect human movement intentions, and the robot cannot quickly follow human movement, so as to avoid data processing and fast action, the effect of improving timeliness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
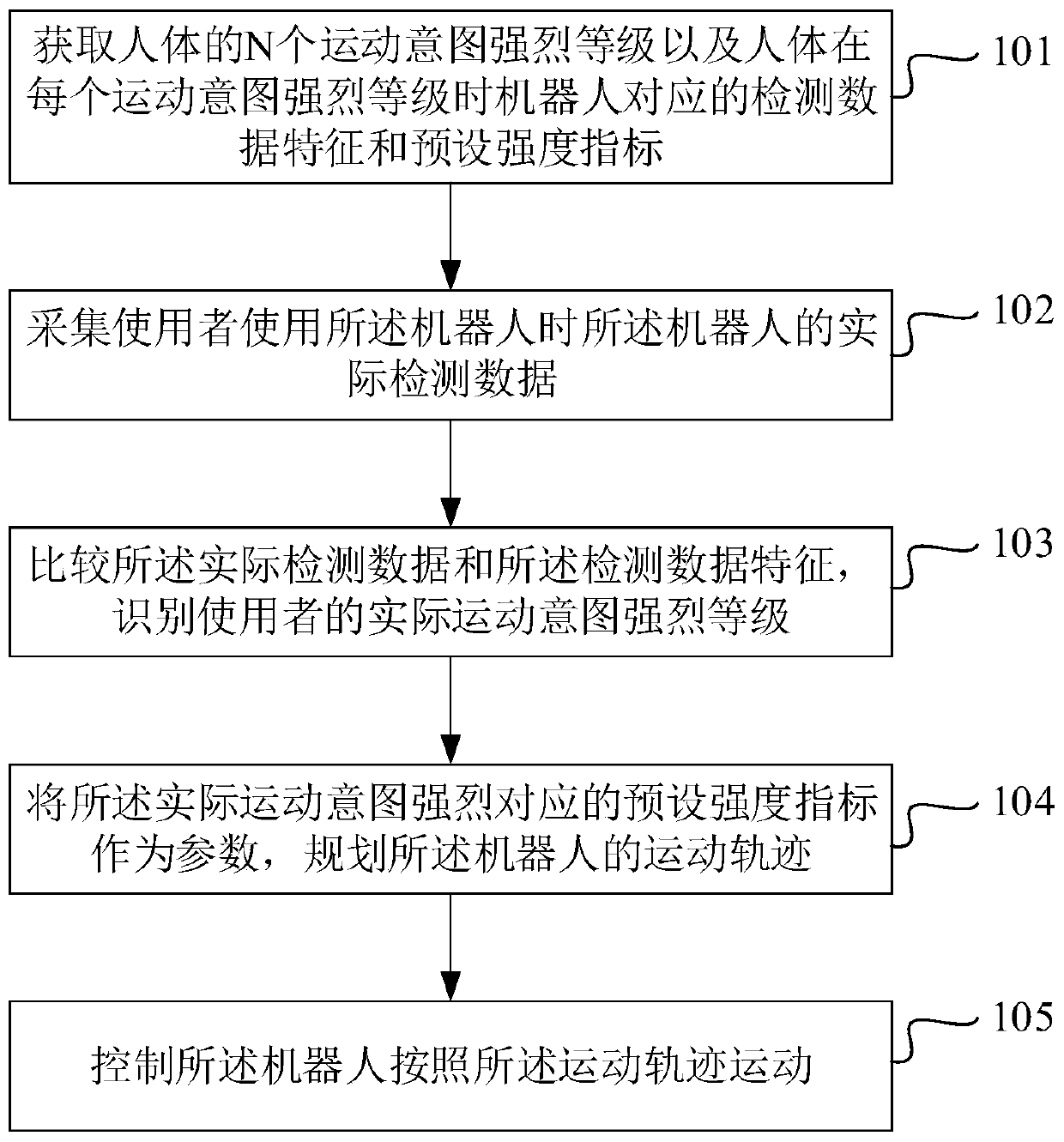
[0050] figure 1A robot motion control method based on human body motion intention detection according to this embodiment is shown. The robot motion control method includes:
[0051] Step 101: Obtain N levels of intensity of the human body's exercise intention, and the corresponding detection data features and preset intensity indicators of the robot at each intensity level of the human body's exercise intention. The detection data feature includes a detection data type and a data value range of the detection data type. Wherein, N is a positive integer. The specific value of N can be determined according to the actual situation.
[0052] Step 102: Collect actual detection data of the robot when the user uses the robot. The actual detected data includes actual data values of the detected data type.
[0053] Step 103: Compare the actual detection data with the characteristics of the detection data, and identify the user's actual intensity level of exercise intention. The ...
Embodiment 2
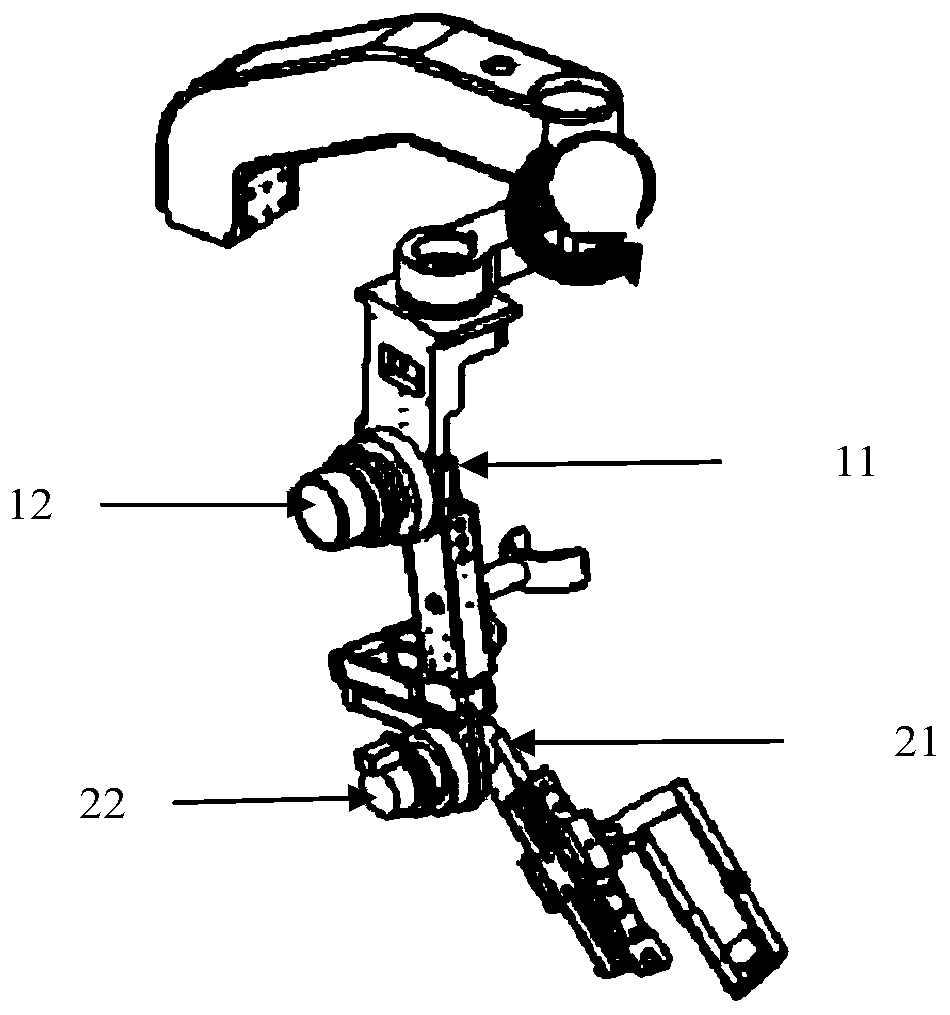
[0069] This embodiment is a further improvement on the basis of Embodiment 1. In order to increase the flexibility of the robot's movement, the robot may include at least one joint, and controlling the movement of the robot generally refers to controlling the movement of the joint of the robot. Each joint is correspondingly provided with a torque sensor and a motor. When using the robot, the human body can integrate the robot with the user by wearing, wearing, binding or other methods. The joints of the robot correspond to the movable joints of the human body, and the torque sensor can detect the direction and torque value of the force exerted by the human body. The direction detected by the torque sensor represents the direction of the movement intention of the human body. The motor can control the movement direction, movement speed, etc. of the joint.
[0070] In this embodiment, the N exercise intention intensity levels of the human body may include N exercise intention ...
Embodiment 3
[0124] Image 6 A robot motion control device based on detection of human motion intention in this embodiment is shown. The robot motion control device includes: a level acquisition module 401 , a data collection module 402 , an intention recognition module 403 , a trajectory planning module 404 and a motion control module 405 .
[0125] The level acquisition module 401 is used to acquire the human body's N strong levels of exercise intention and the detection data characteristics and preset strength indicators corresponding to the robot when the human body is at each level of intensity of exercise intention. The detection data characteristics include the type of detection data and the The data value range of the detection data type, N is a positive integer. The specific value of N can be determined according to the actual situation.
[0126] The data collection module 402 is used to collect the actual detection data of the robot when the user uses the robot, and the actual ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More