

Method and system for guiding mechanical hand grabbing through three-dimensional visual guidance
A technology of 3D vision and manipulator, which is applied in the field of visual guidance, can solve the problem that the manipulator cannot independently identify non-fixed target operating points in 3D space, and achieve the effect of high repeatability and guaranteed operation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the object, technical solution and advantages of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings and examples.
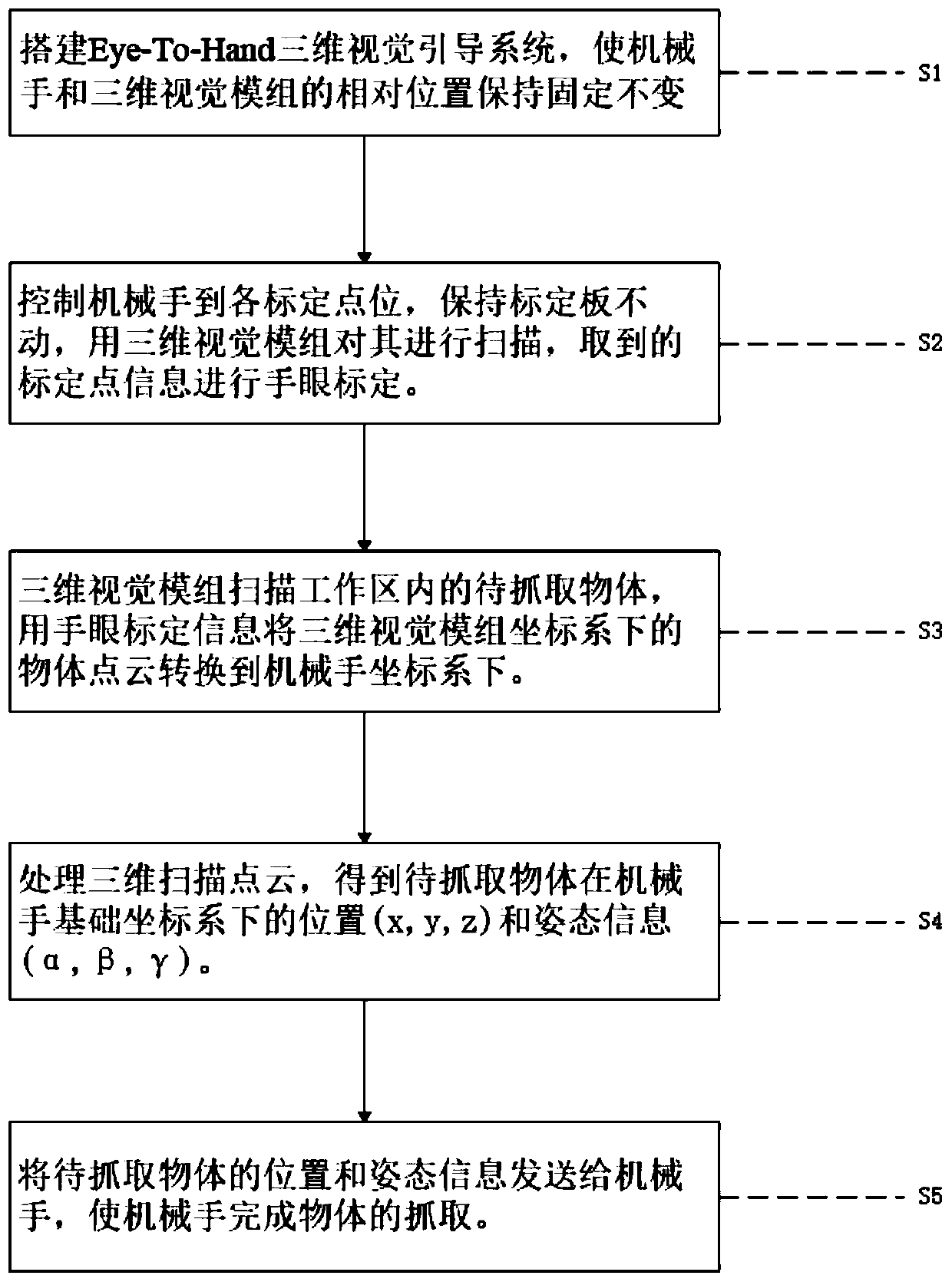
[0033] like figure 1 As shown, a three-dimensional vision-guided manipulator grasping method includes the following steps:
[0034] A. The system model of the 3D vision guidance system, that is, the spatial geometric relationship between the 3D vision module device 100 and the robot. We use the Eye-To-Hand system to build the Eye-To-Hand 3D vision guidance system. When the platform 200 and the environment are fixed, the base of the robot does not move, and the three-dimensional vision module device 100 is installed at a fixed position relative to the base of the manipulator 300 to ensure the stability and reliability of the entire system; The movement of the arm changes, and the target object is not easy to leave the observation field o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More