

Mixed path planning method applied to motion control of indoor mobile robots
A robot motion and hybrid path technology, applied in the field of robotics, can solve the problems of poor local planning optimality, local minimum value, unreachable target, etc., and achieve the effects of good completeness, improved execution efficiency, and convenient calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
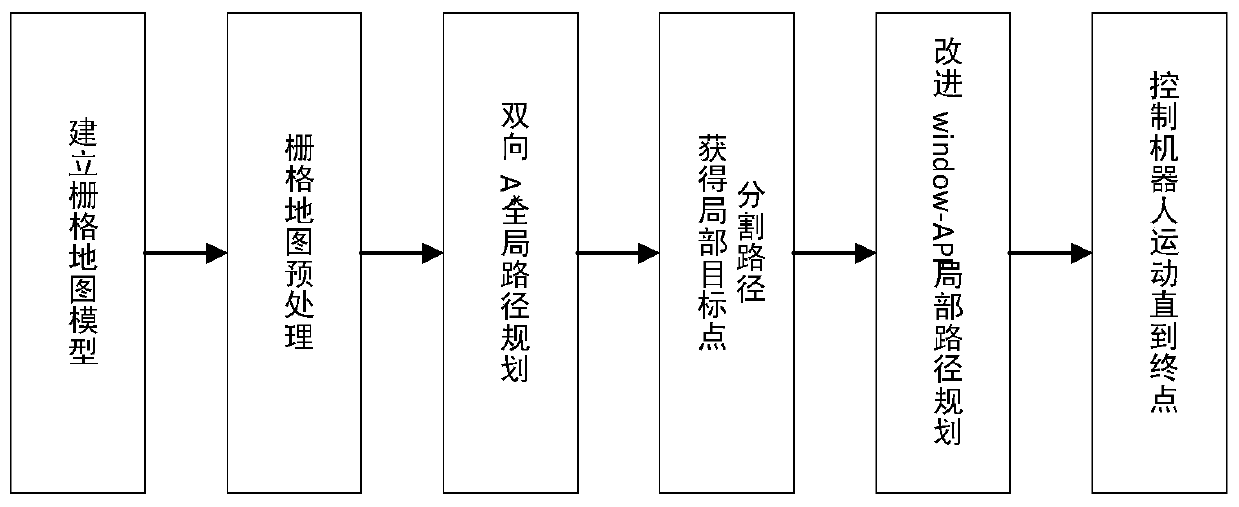
[0028] like figure 1 As shown, the present invention designs a hybrid path planning method and system for indoor mobile robot motion control, including the following steps:
[0029] Step 1. Establish a global grid map model of the indoor robot working environment, and set the starting point and target point of the robot movement;
[0030] First, the Kinect sensor is used to scan the entire environmental information, and the global grid map information of the indoor environment is obtained through SLAM technology. The grids use values 0-1 to represent accessible and unreachable areas in the actual environment.
[0031] Step 2. Obstacle preprocessing in the grid map;
[0032] By making the adjacent grids of unreachable grids unreachable, the expansion processing of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More