

Cruising path planning system and method for unmanned surface vehicle in limited area
A cruising path and planning system technology, applied in radio wave measurement system, radio wave reflection/reradiation, utilization of reradiation, etc., can solve problems such as unreachable, inaccurate noise statistical characteristics, loss of track information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027]The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
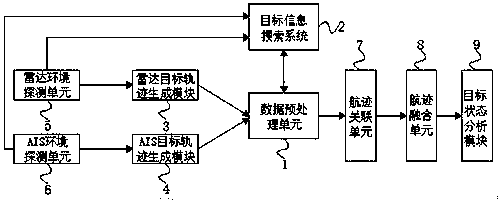
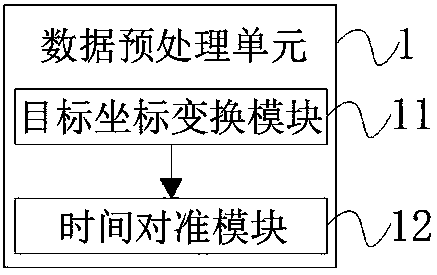
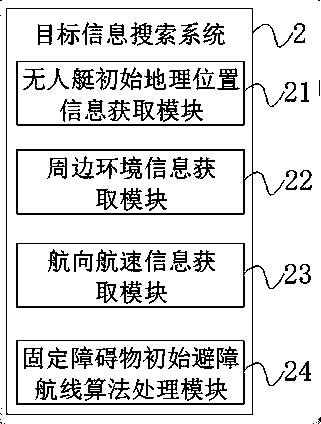
[0028] see Figure 1-4 , the embodiment of the present invention provides a technical solution: a limited-area surface unmanned boat cruising path planning system, including a data preprocessing unit 1 and a target information search system 2, and the data preprocessing unit 1 and the target information search system 2 realize Two-way connection, the input end of data preprocessing unit 1 is connected with the output end of radar target trajectory generation mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More