

Visual sense and laser fusion based robot positioning method and navigation application
A robot positioning and robot technology, applied in two-dimensional position/channel control and other directions, can solve problems such as low precision, achieve high precision, good real-time performance, and improve mobile efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0044] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
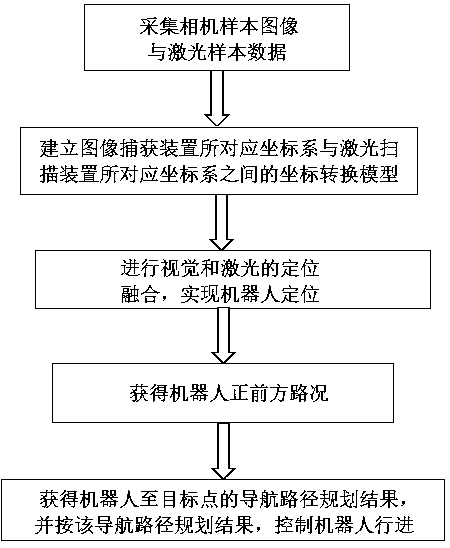
[0045] The present invention designs a robot positioning method based on fusion of vision and laser, and uses an image capture device and a laser scanning device installed on the robot to realize the positioning of the robot itself. The main optical axes of the two points in the same direction. In practical applications, the image capture device is a depth image capture device, and specifically a Kinect camera can be selected, and the laser scanning device is a two-dimensional laser scanning device.
[0046] The Kinect camera can provide environmental depth data in a simple and low-cost way. Taking advantage of this advantage, this paper proposes to install 2D LiDAR and Kinect camera on the mobile robot at the same time, and combine laser scanning and depth image to detect obstacles. This obstacle detection method not o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More