A cam energy storage modular gouging mechanism and fighting robot
An energy storage module and cam technology, which is applied in the directions of manipulators, toys, automatic toys, etc., can solve the problems of poor attack effect of fighting robots, and achieve the effect of improving attack effect, improving service life and high attack effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
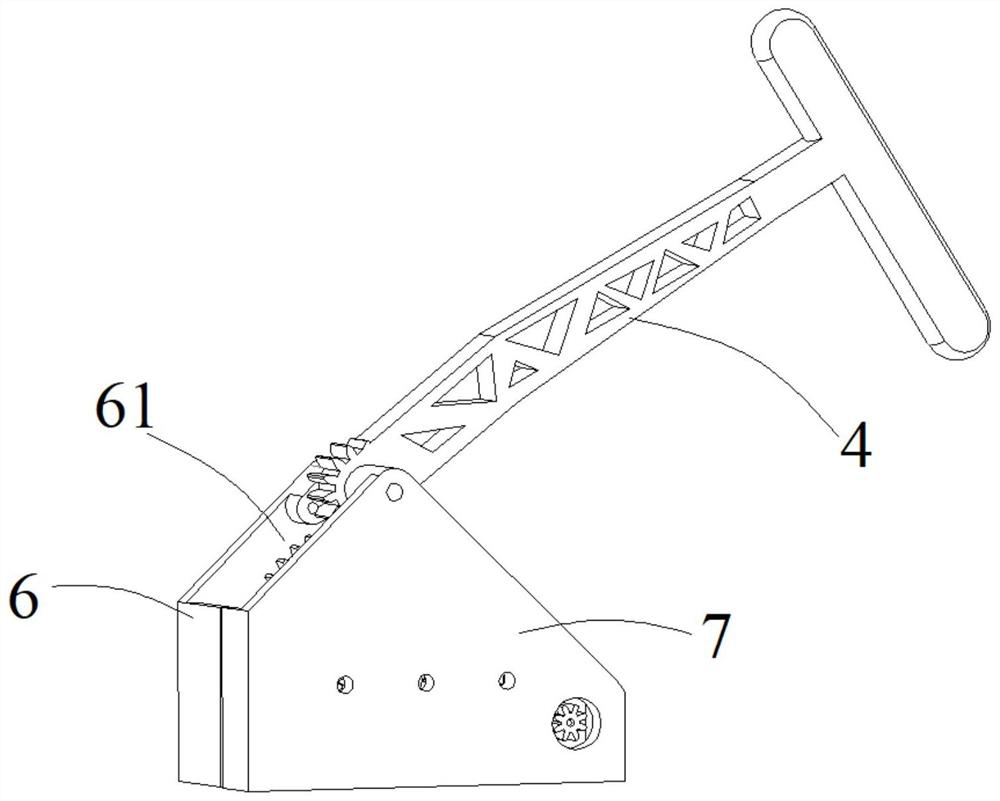
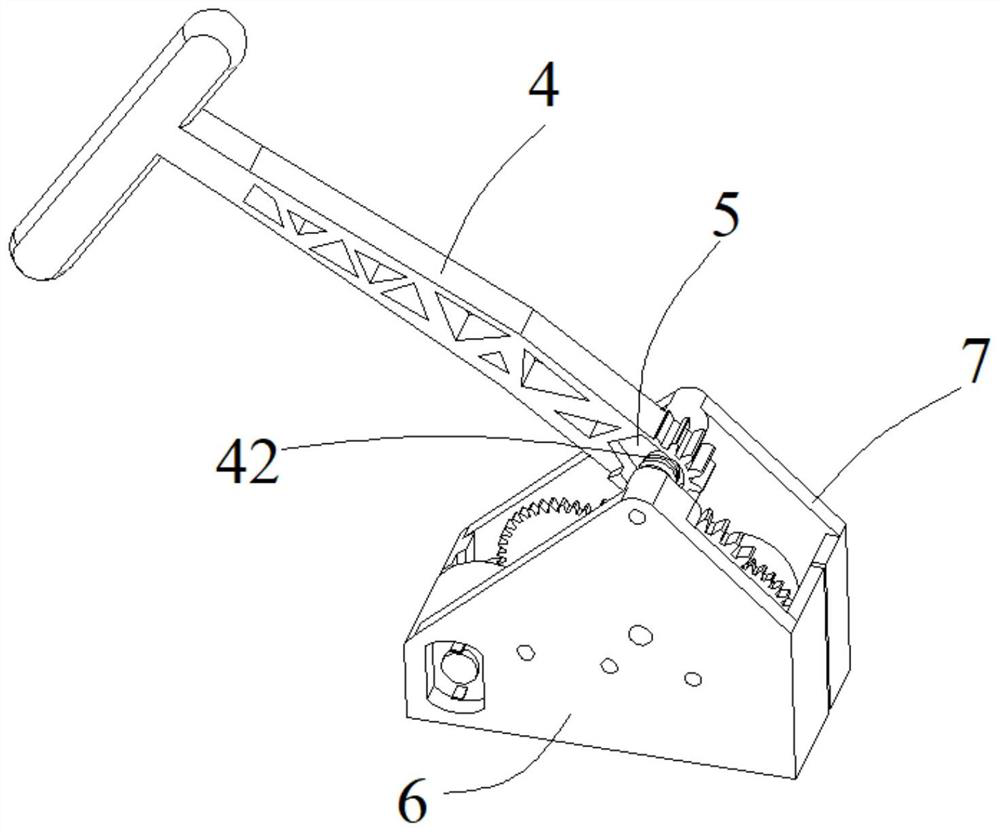
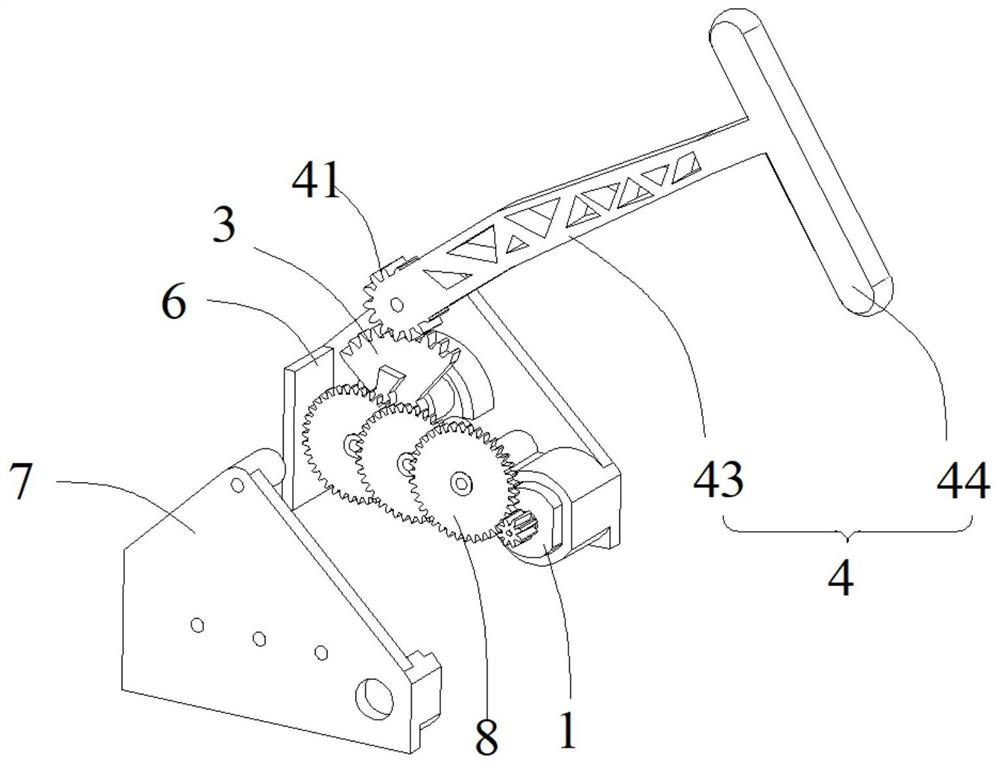
[0046] combine Figure 1-4 As shown, a cam energy storage modular chiseling mechanism includes a drive motor 1, a cam 2, a swing gear 3, and a telescopic chisel member 4; Control device; drive motor 1 drives cam 2 to rotate; cam 2 pushes swing gear 3 to rotate; swing gear 3 drives chiseling member to rotate; telescopic chisel member 4 is provided with telescopic drive mechanism (not shown in the figure), displacement sensor (not shown in the figure), telescopic control device (not shown in the figure); the telescopic drive mechanism drives the retractable chisel member 4 to expand and contract; the telescopic control device receives the distance test value delivered by the displacement sensor, and according to the received distance test value Control the stop and start of the telescopic drive mechanism.
[0047]Among them, the swing gear 3 is an incomplete gear, which can avoid its interference with the operation of other components on the premise of satisfying the chiseling ...
Embodiment 2
[0071] A fighting robot, comprising the above-mentioned cam energy storage modular chiseling mechanism and a robot shell 101; the robot shell is provided with a travel switch (not shown) electrically connected to the control unit; the robot shell 101 is spliced by a plurality of plates Formed into a box-shaped structure, which can reduce the space occupied by the disassembled area and improve the defense performance of the robot itself; the above-mentioned cam energy storage modular gouging mechanism and the robot shell 101 are detachably connected. When the spare parts are damaged, they can be Easy to replace spare parts. Wherein, the travel switch is set adjacent to the retractable chiseling member 4, so that the cam 2 rotates to a critical position, that is, the swing gear 3 swings to the maximum angle, and when the energy storage torsion spring 42 has the maximum energy storage, the telescopic chisel member 4 can Trigger the travel switch, and then make the control unit ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More