

Six-degree-of-freedom acupuncture robot for internal use of magnetic resonance imager
A magnetic resonance imaging, degree of freedom technology, applied in surgical robots, trocars, puncture needles, etc., can solve the problems of real-time performance, poor stability and accuracy of the platform, nonlinear errors and cumbersome driving devices, etc., to achieve surgical precision. Improve the effect of stable and reliable puncture process and high displacement resolution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0043] This invention may be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the invention to those skilled in the art. In the drawings, components are exaggerated for clarity.
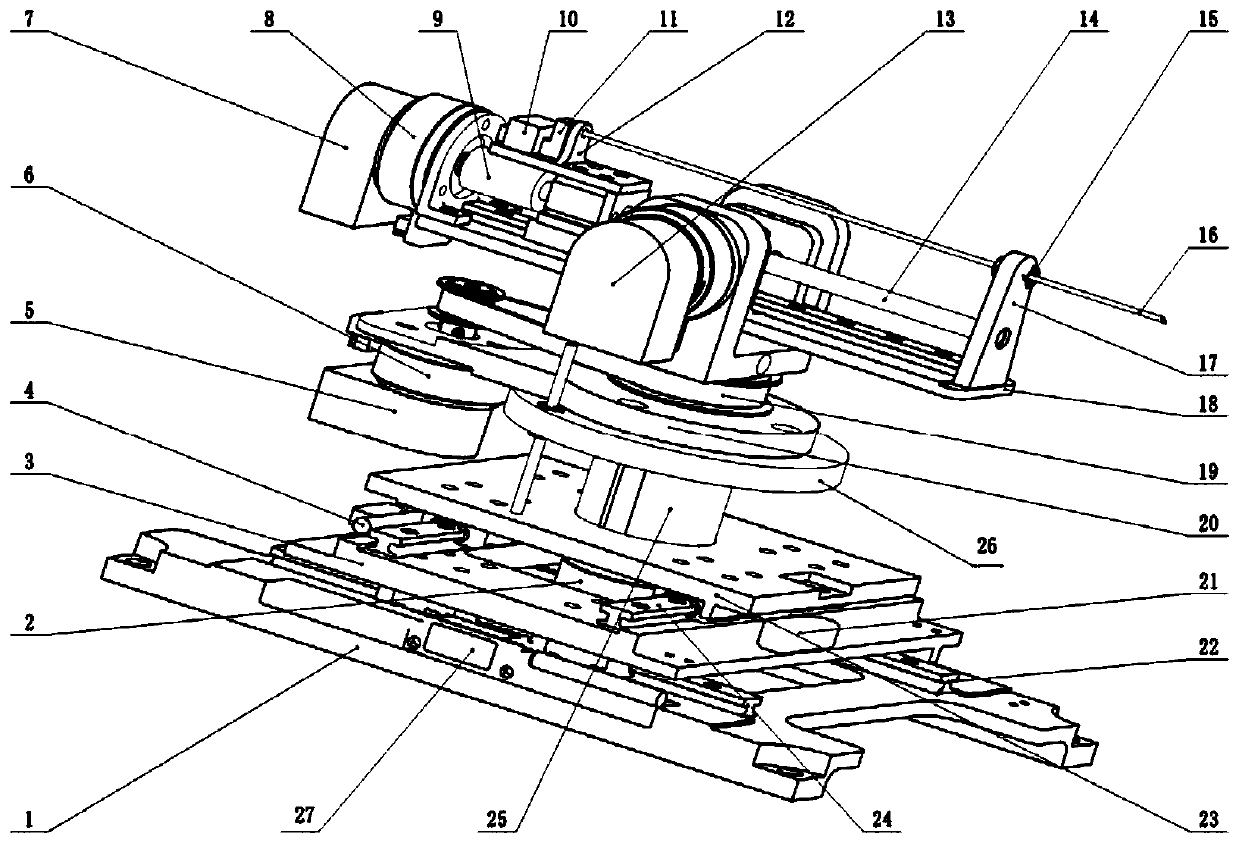
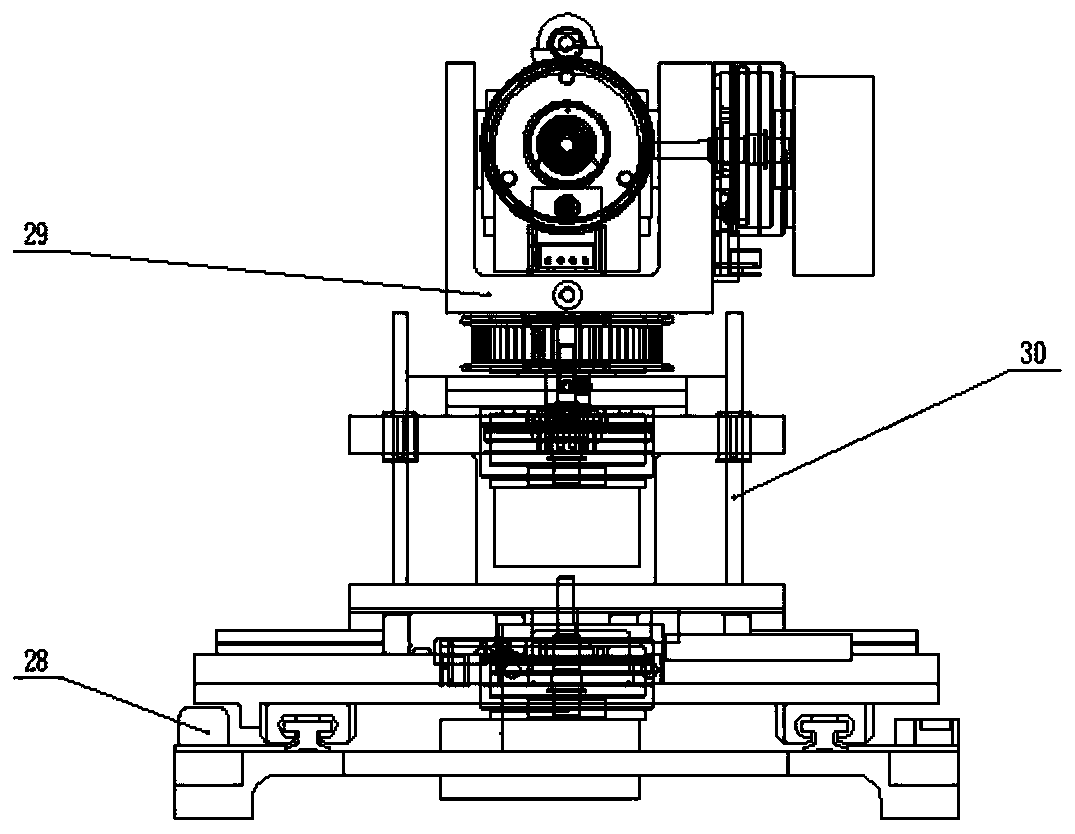
[0044] Such as figure 1 , figure 2 As shown, the present invention is a six-degree-of-freedom acupuncture robot used inside a magnetic resonance imager, including a Cartesian module, a swing module and an acupuncture module;
[0045] The swing module is fixed on the Cartesian module, the acupuncture module is fixed on the swing module, wherein the Cartesian module is used to control the movement of the swing module in the X direction, the Y direction and the Z direction, and the Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More