

AGV handling robot navigation method and device based on laser-guided map construction
A technology for handling robots and map construction, which is applied in the field of robot navigation, can solve the problems of complex path limitations, complicated installation, and great influence on reliability, so as to achieve the effect of strengthening the application range and avoiding environmental damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
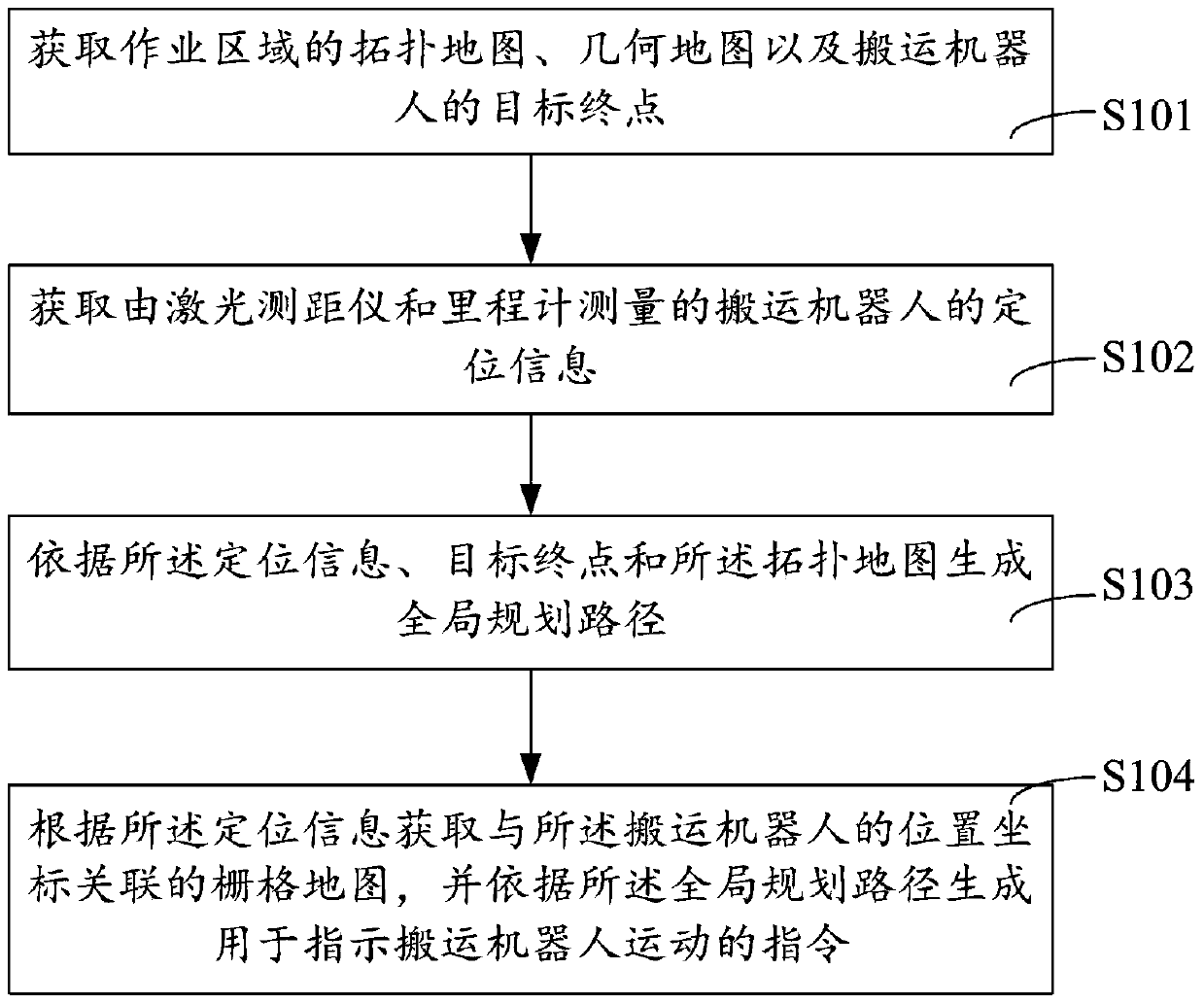
[0028] see figure 1 , which is a flow chart of an embodiment of a laser-guided map-constructed handling robot navigation method in the present invention.
[0029] A kind of carrying robot navigation method that laser-guided map construction comprises steps:
[0030] S101: Obtain the topological map and geometric map of the operation area and the target end point of the handling robot;
[0031] The topological map includes topological relationships of environments such as obstacles in the work area and operable roads. When the starting point and target end point of the handling robot are obtained, a global planning path represented by topological connections can be generated.
[0032] The geometric map includes a map representing obstacles in the work area, ope...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More