

Unmanned excavation system and method in complex construction environment based on natural interaction
A construction environment, natural technology, applied in the operation method of excavator/dredger, input/output of user/computer interaction, earthmoving machine/shovel, etc. Good feedback mechanism, reducing the probability of occurrence, and improving the effect of safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not conflict with each other.
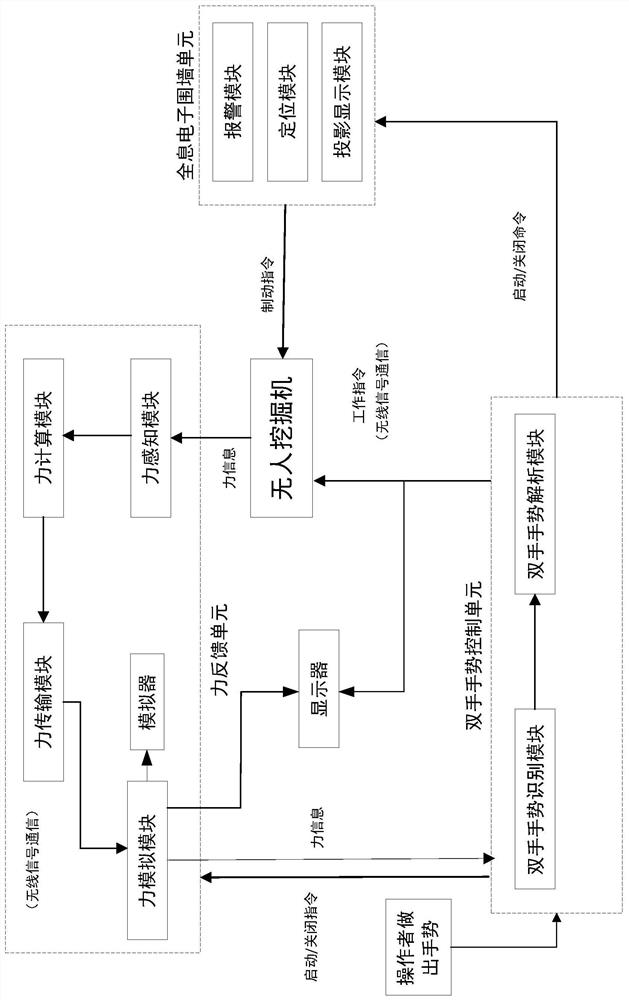
[0027] Aiming at the personal safety problems of workers and the construction safety of unmanned excavators in complex construction environments, the invention provides a natural interaction-based method that is applied in complex construction environments and can effectively enhance the interactive functions of unmanned excavators and ensure construction safety. The unmanned excavation system and i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More