

Hydraulic manipulator teleoperation control system and method
A technology of teleoperation control and hydraulic machinery, which is applied in the direction of manipulators and manufacturing tools, can solve the problems of low control efficiency, difficulty in combining safety and control, and inability to personally perceive, etc., to achieve the effect of improving execution efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
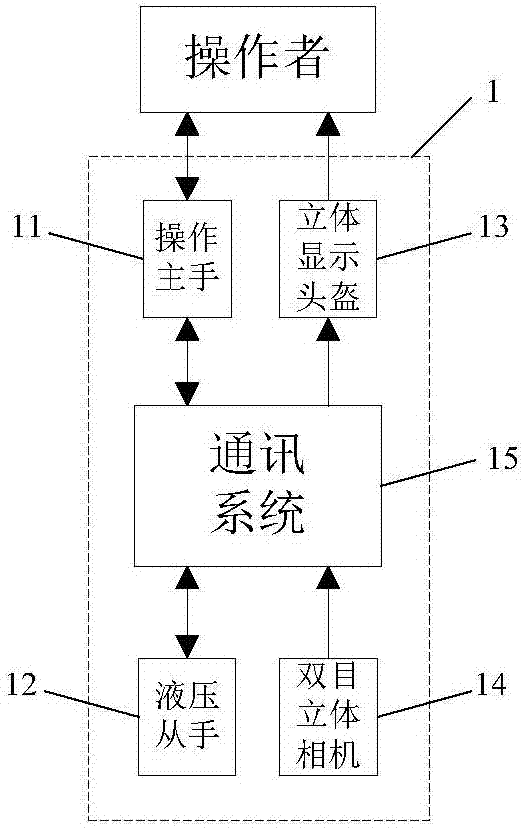
[0020] On the one hand, the present invention provides a hydraulic mechanical arm remote operation control system 1, such as figure 1 and figure 2 As shown, it includes the operator's master hand 11 for on-site manipulation by the operator and the hydraulic slave hand 12 for remote control, wherein:
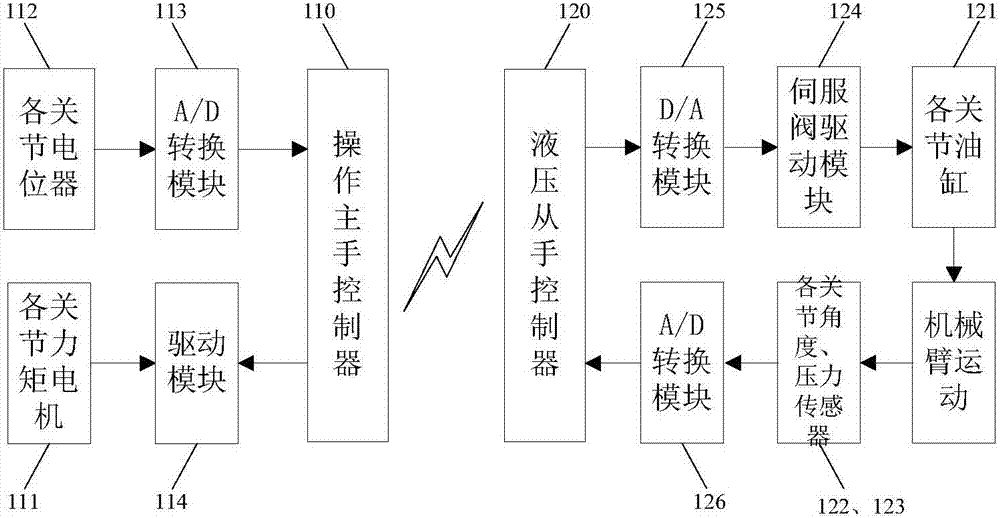
[0021] A torque motor 111 and a potentiometer 112 are installed at each joint of the master hand 11, and the motor drive mode is adopted, and the operation is simple and convenient; each joint of the hydraulic slave hand 12 is equipped with a hydraulic cylinder 121, an angle sensor 122 and a pressure sensor 123 , using hydraulic drive so that the end can bear a heavy load;
[0022] The operating master hand 11 is provided with an operating master hand co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More