

Calibration system and calibration method for assisting laser osteotomy robots
A surgical robot and auxiliary laser technology, applied in the field of robot calibration, can solve problems such as complex operation process, dependence on measurement accuracy, and inability to meet clinical surgical requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0062] This embodiment provides a calibration system for an assisted laser osteotomy robot, the calibration device includes a robot system, a vision system, a calibration device and a processor, and the robot system adopts the existing technical structure of an assisted laser osteotomy robot system , which mainly includes a six-degree-of-freedom robot arm and a laser tool installed at the end of the robot arm. The vision system includes an infrared stereo camera, and the calibration device is a positive four-sided marker.
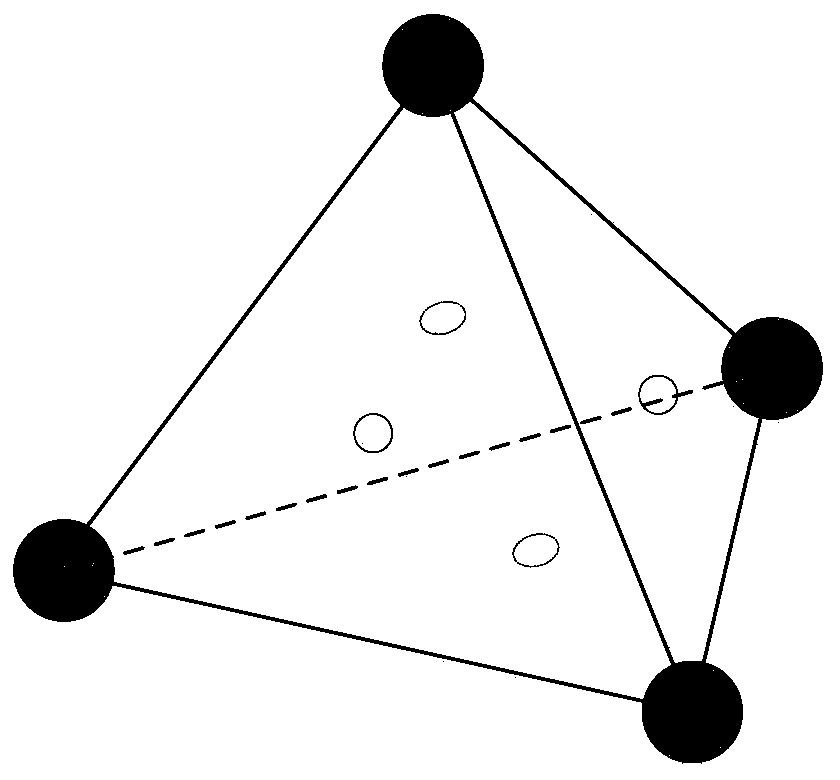
[0063] Please refer to the attached figure 1 , the calibration device is a positive four-sided marking body, tracking devices for infrared reflective balls are respectively installed at the four vertices of the positive four-sided marking body, and the four planes of the positive four-sided marking body are made of transparent materials respectively, so The central marking points of the four planes of the above-mentioned marking tool are respectively provi...
Embodiment 2
[0088] This embodiment provides a calibration method for an assisted laser osteotomy robot, which is implemented based on the calibration device for an assisted laser osteotomy robot as described above.
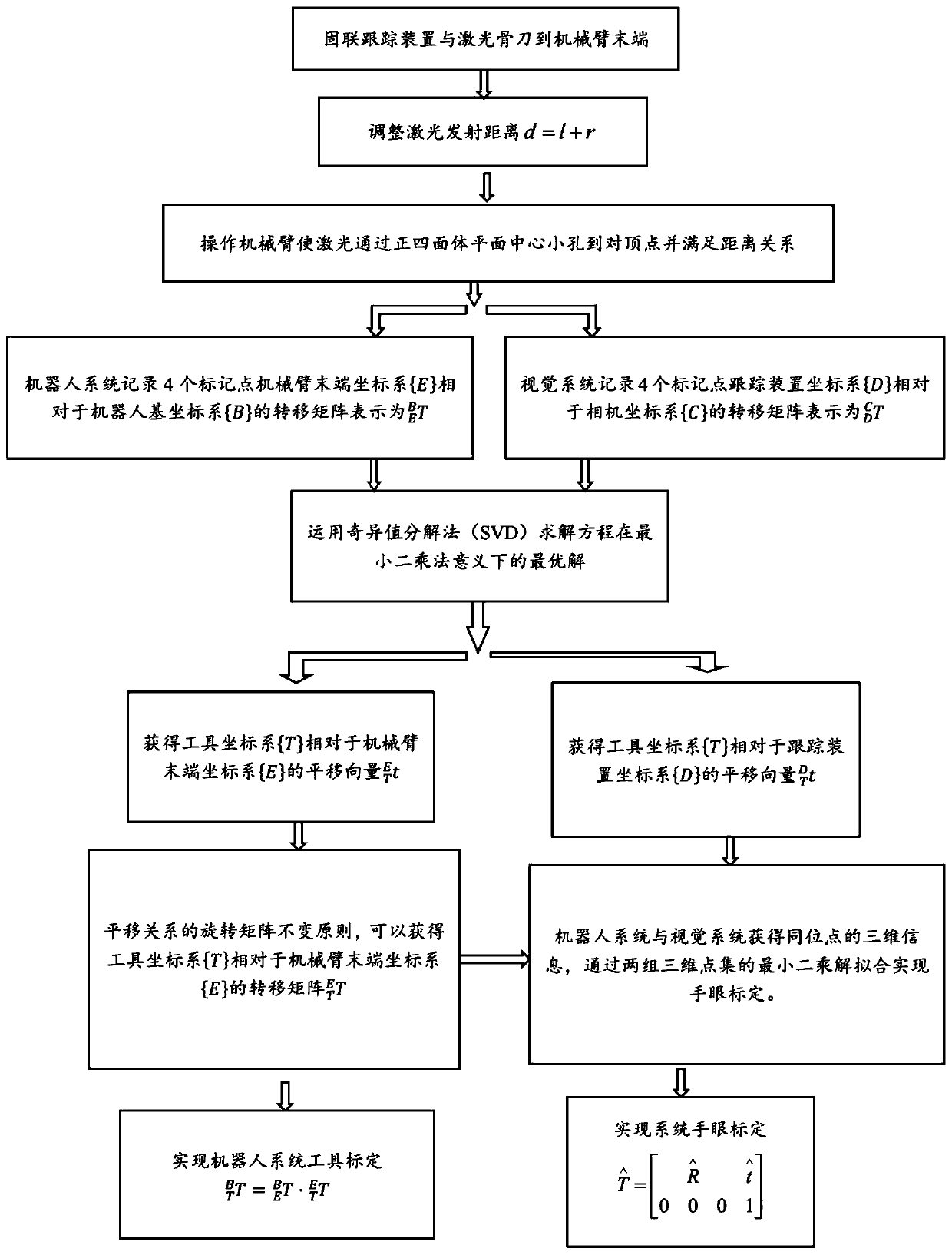
[0089] Please refer to the attached figure 2 , the calibration method of the auxiliary laser osteotomy robot comprises the following steps:
[0090] S101, setting a calibration body and a tracking device for an auxiliary laser osteotomy robot, and adjusting a laser emission distance.
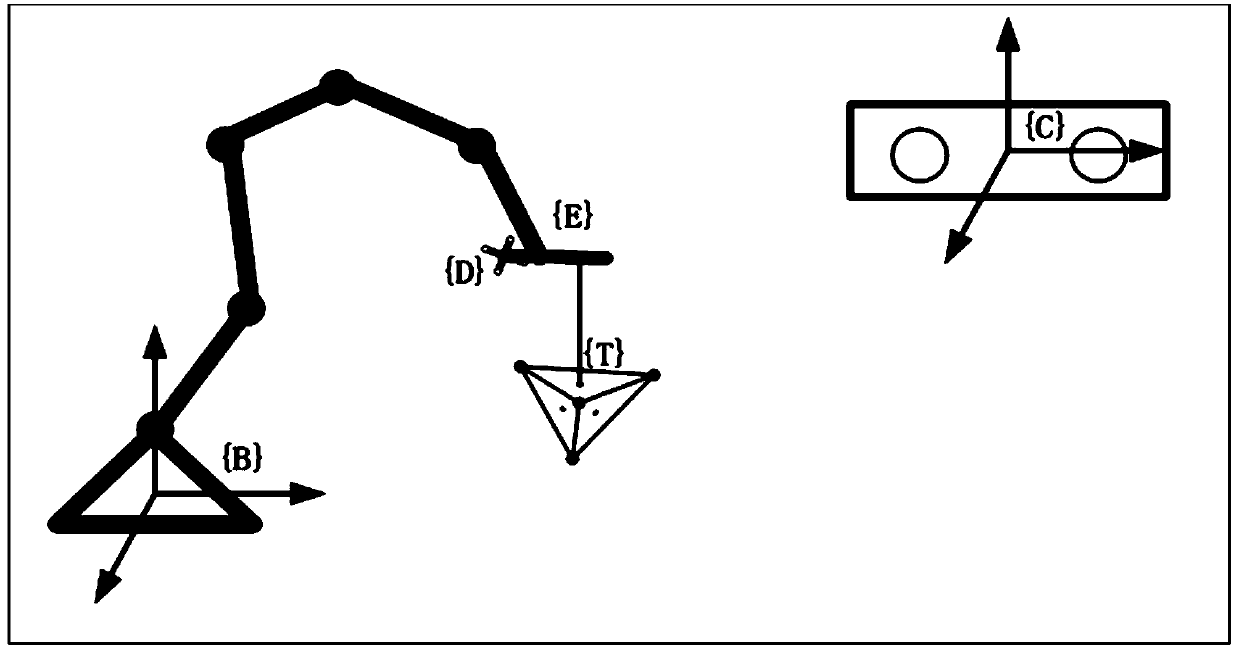
[0091]Let the robot base coordinate system be {B}, the robot end coordinate system be {E}, the camera coordinate system be {C}, the tracking device coordinate system be {D}, and the laser tool coordinate system be {T} (hereinafter referred to as tool coordinate system), {T} is the coordinate system established with the effective point of laser ablation as the origin, please refer to the attached image 3 .
[0092] Specifically, in the step 101, the specific implementation of adjusting the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More