

Automobile obstacle avoidance lane-change path planning method
A vehicle and path technology, which is applied in vehicle position/route/altitude control, motor vehicle, two-dimensional position/flight control and other directions, and can solve problems such as automatic obstacle avoidance or unreasonable path planning for lane changing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with the accompanying drawings.
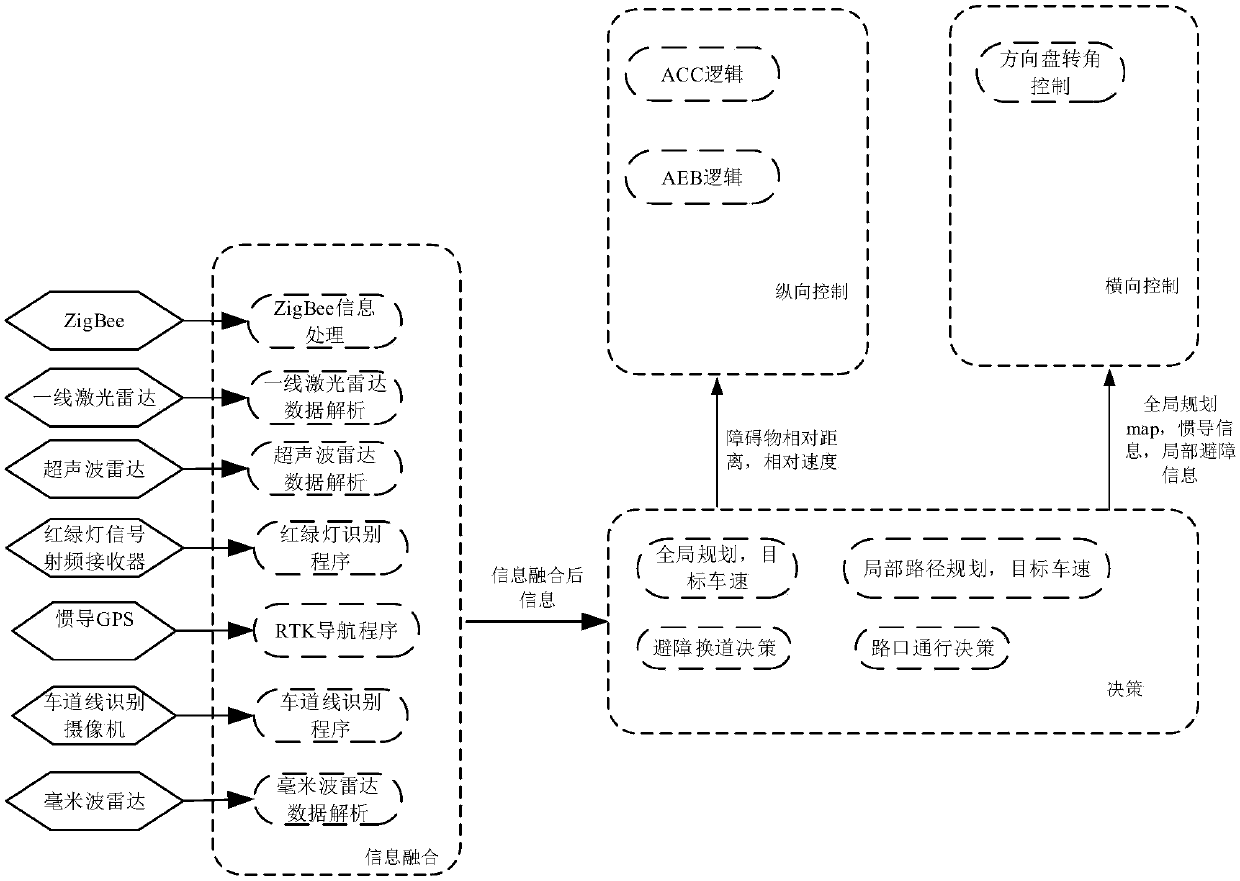
[0025] The present invention provides a planning method for vehicle obstacle avoidance and lane change, which can be applied to unmanned vehicles, such as figure 1 As shown, the unmanned vehicle includes a lateral control module, a longitudinal control module, an information fusion module and a decision-making module, wherein the information fusion module is set for sampling and connecting ZigBee, first-line laser radar, ultrasonic radar, red street light signal radio frequency receiver, Inertial navigation GPS, lane line recognition camera and millimeter-wave radar, and process or analyze the sampled signal; the input end of the decision-making module is connected to the information fusion module, which is used to collect the output signal of the information fusion module, and simultaneously carry logical judgment and output control signals To the lateral co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More