Man-machine cooperative dynamic obstacle avoidance method and system based on deep reinforcement learning
A technology of dynamic obstacle avoidance and enhanced learning, applied in the fields of motor vehicles, control/regulation systems, non-electric variable control, etc. High stability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
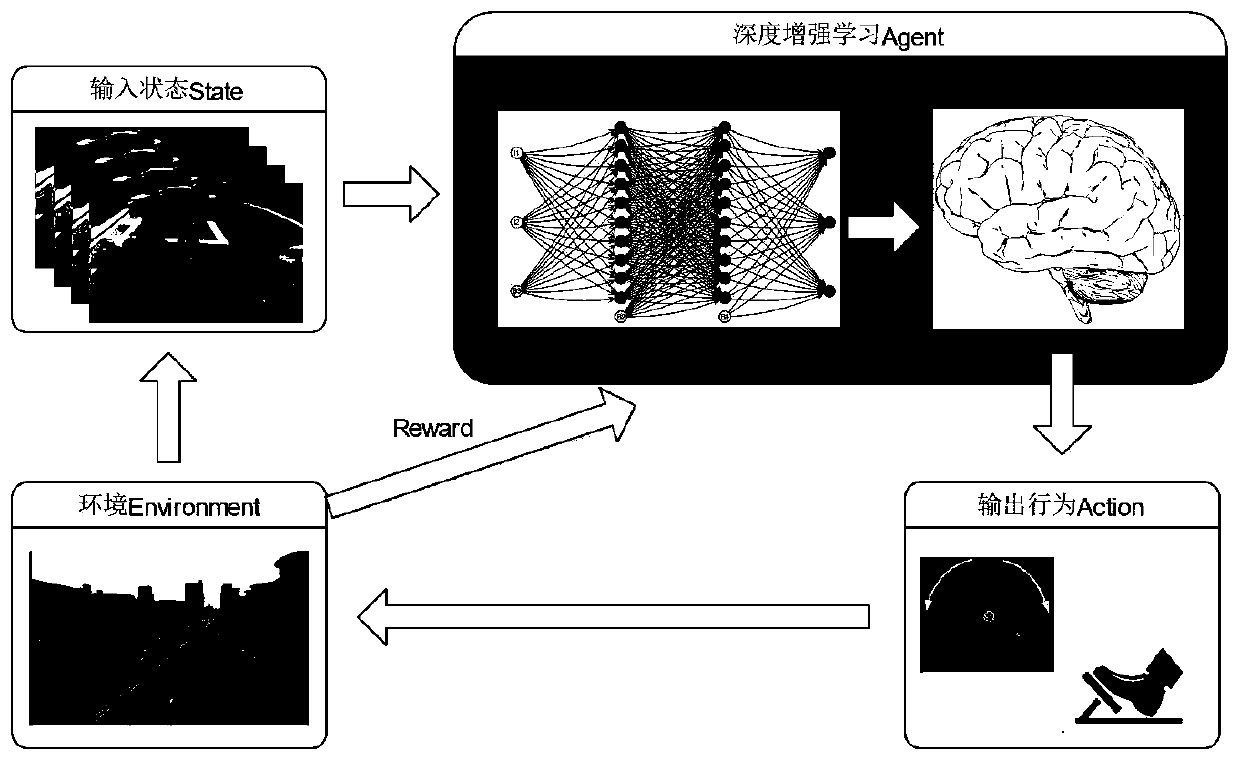
[0060] Such as Figure 1-28 A kind of intelligent vehicle dynamic obstacle avoidance method based on the depth reinforcement learning method shown, comprises the following steps:
[0061] S1. Obtain the simulation perception image I of the smart car at time t t ;
[0062] S2, the simulated perception image I t Input the neural network model, and the neural network model outputs the state feature s of the smart car at time t t And the corresponding probability of executing each action;
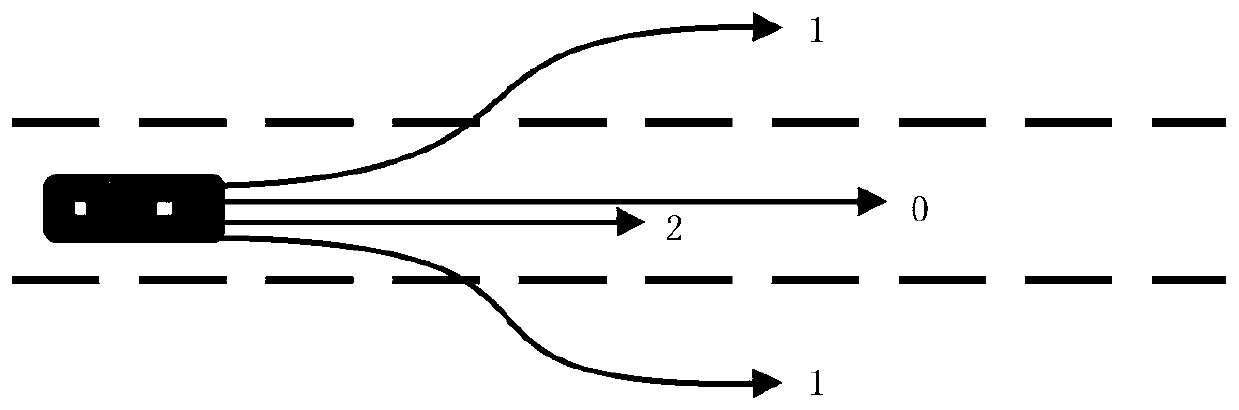
[0063] S3. According to the probability distribution corresponding to each action, select the execution action a of the smart car at time t t And output, wherein, according to the ε-greedy strategy, determine the execution action a of the smart car at time t from each action t ,specific:
[0064] The action of the smart car is selected according to the action output by the neural network model at the ratio of (1-ε) to interact with the environment, and the action of the smart car is rando...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com