

Maglev train and levitation control system, controller and control method of maglev train
A suspension controller and suspension control technology, which is applied in general control systems, control/regulation systems, program control, etc., can solve the problems of insufficient redundancy of suspension controllers, failure of suspension controllers, and great influence of non-failure time. To achieve the effect of simple structure, low cost and high failure rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
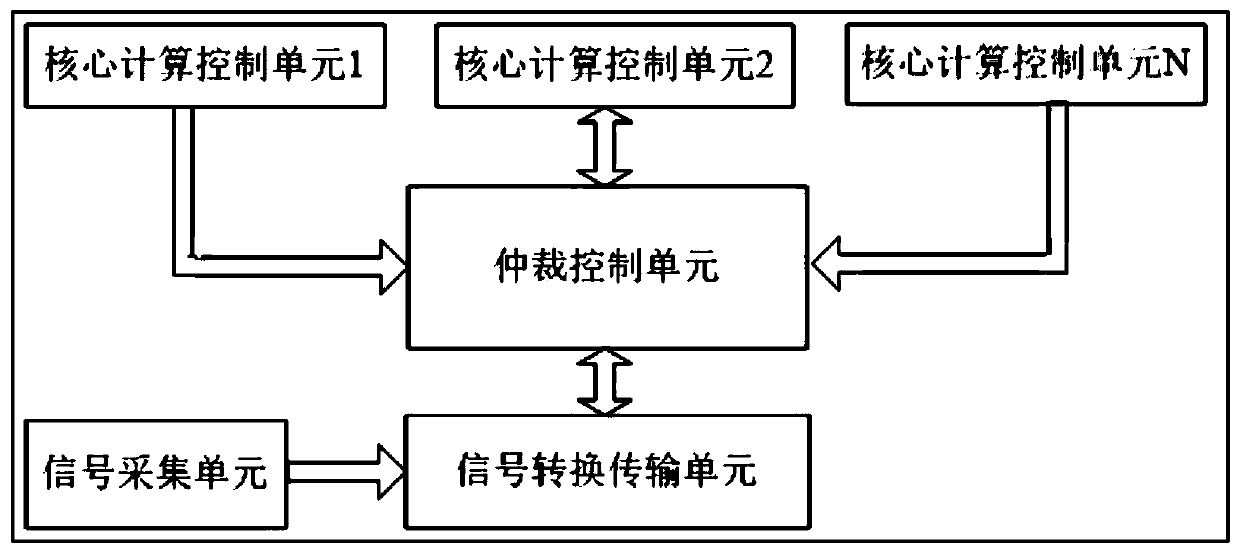
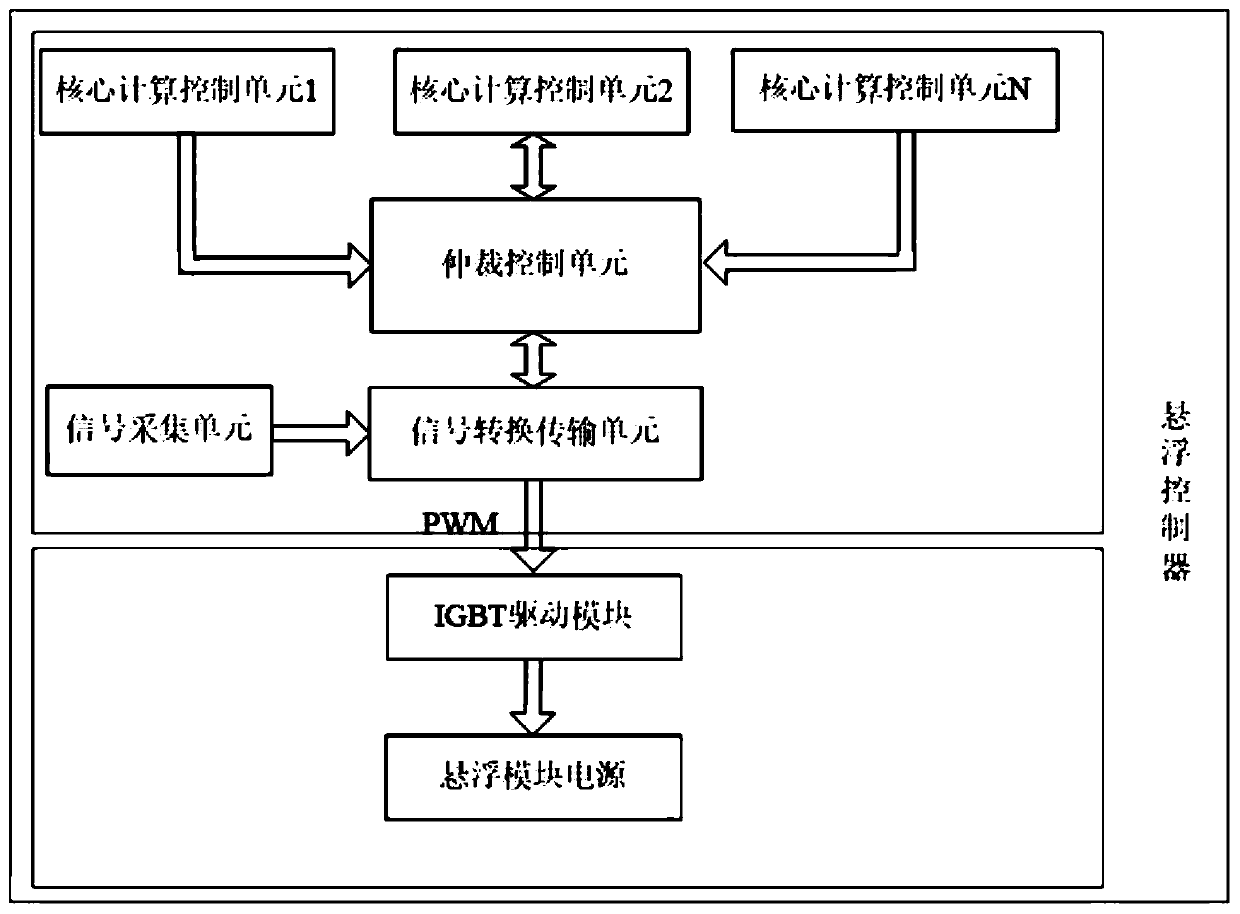
[0036] A suspension controller, including a weak current structure and a strong current structure connected to each other. The weak current structure is mainly used for signal processing and suspension control digital operation units, and outputs control information for the strong current part. The strong current structure is mainly used to realize the control of the output current control, specifically, as image 3 As shown, the weak current structure includes a signal acquisition unit, an arbitration control unit, a core computing control unit, and a signal conversion and transmission unit. The arbitration control unit is used to monitor the working status of each core computing control unit in real time, determine the accuracy of the core computing control unit, select The optimized control calculation amount is output; the signal conversion and transmission unit is used to realize the signal reception, conversion and transmission; the signal acquisition unit is used for the...
Embodiment 2
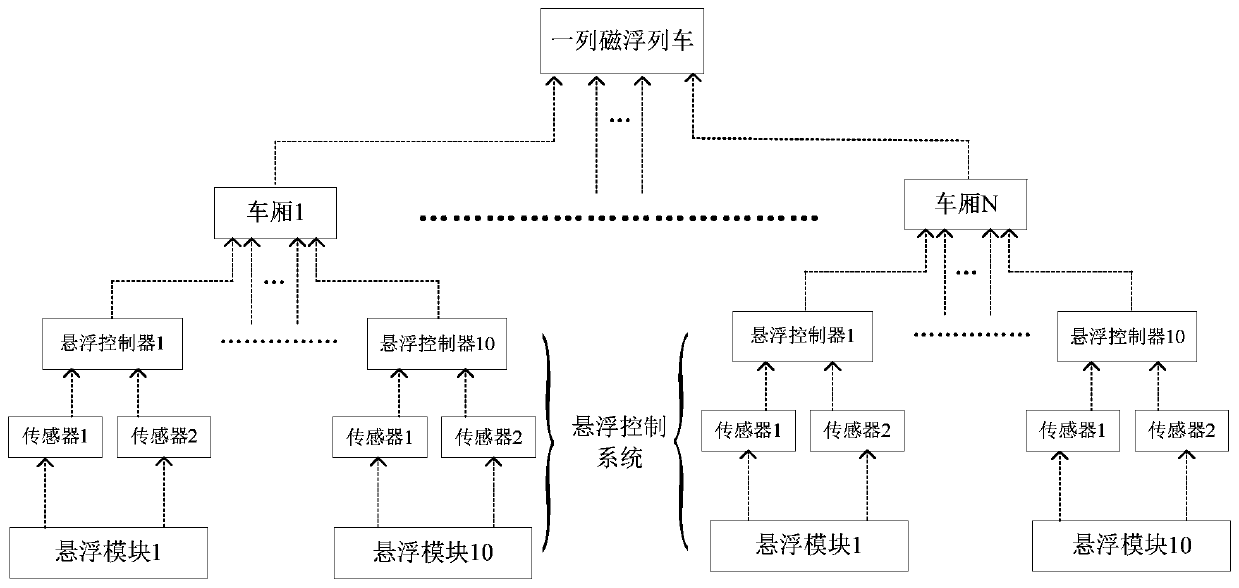
[0041] A suspension control system, including a suspension controller, a suspension module and a sensor installed on the suspension module, the suspension controller is connected to the suspension module, the suspension controller is the suspension controller described in the first embodiment above, and the aforementioned signal acquisition The unit is also used to collect information from the sensors.
[0042] In a further technical solution, the sensor includes an acceleration sensor, a gap sensor and a current sensor arranged in parallel, the acceleration sensor is used to measure the vertical motion acceleration of the suspension module, and the gap sensor is used to measure the suspension gap of the suspension module ; The current sensor is used to measure the suspension current of the suspension module. The measurement information of the acceleration sensor, gap sensor and current sensor is finally transmitted to the suspension controller.
[0043] In addition, it should ...
Embodiment 3
[0045] like Figure 4 As shown, a suspension control method of the present invention comprises the following steps:
[0046] Step 1: After the system is powered on and initialized, it starts to run;
[0047] Step 2: The signal acquisition unit collects the sensor information and the internal information of the suspension controller;
[0048] Step 3: Transmit the collected sensor information and the internal information of the levitation controller to several independent core computing control units through the signal conversion and transmission unit;
[0049] Step 4: Each independent core calculation control unit performs calculation according to the pre-designed control strategy, and sends the calculation result to the arbitration control unit;
[0050] Step 5: Verify the data calculated by the core computing control unit through the arbitration control unit, detect all core computing control units, output the correct data to the signal conversion and transmission unit, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More