

Method for determining GPS deception by single unmanned aerial vehicle based on Kalman filtering under wind field interference
A Kalman filter and UAV technology, applied in the field of sensor information, can solve the problems of anti-GPS spoofing, low reliability, cumbersome wind field estimation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention is described in further detail below in conjunction with accompanying drawing:
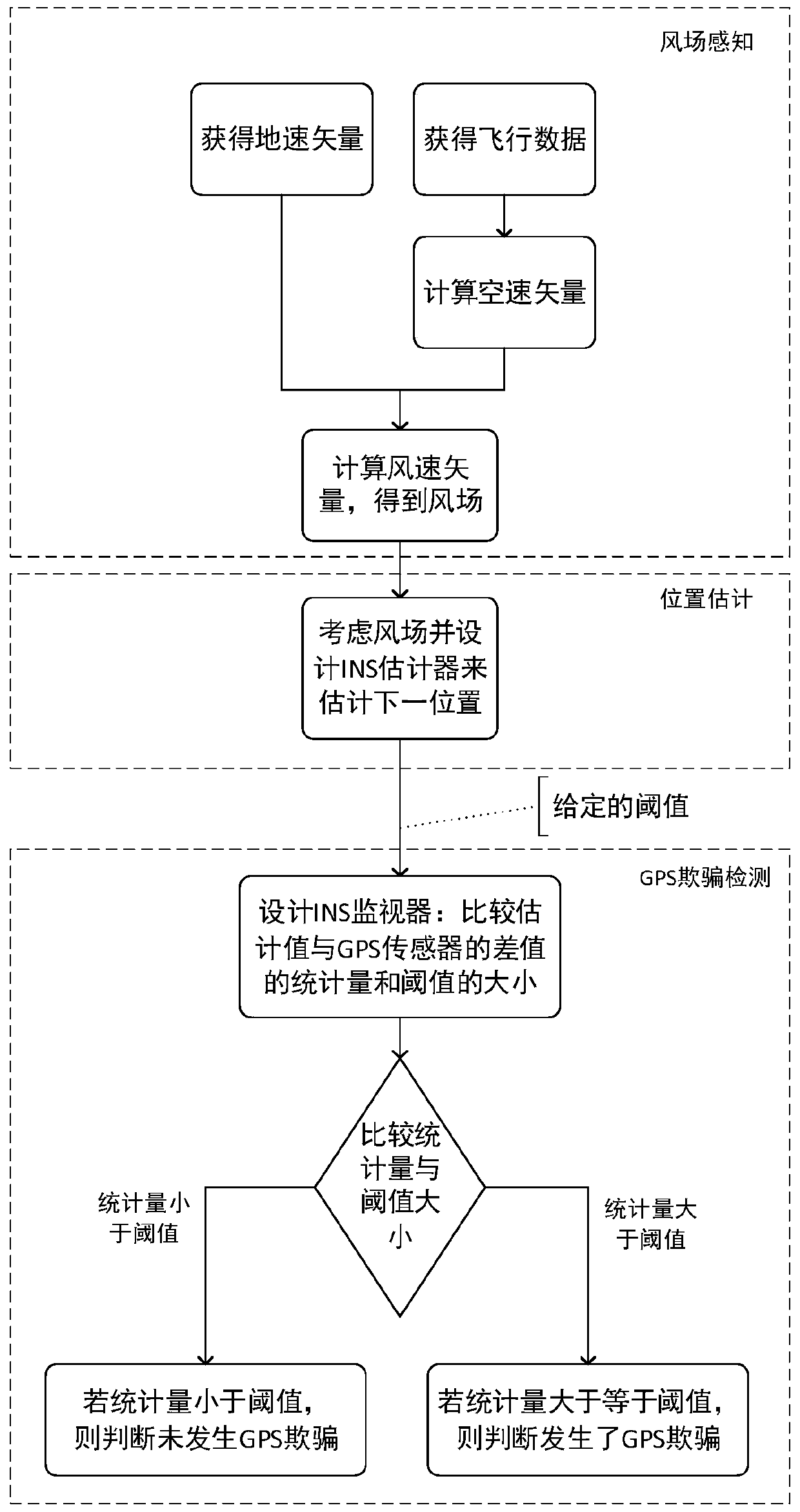
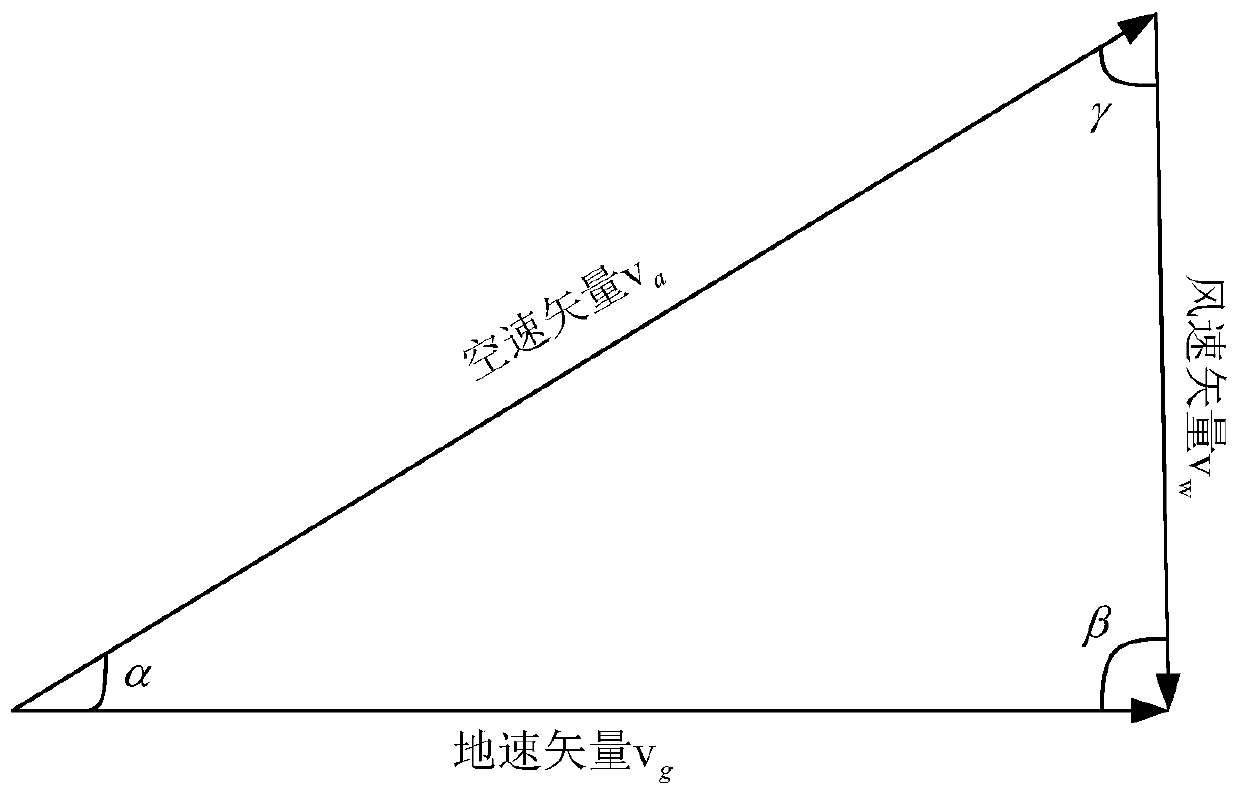
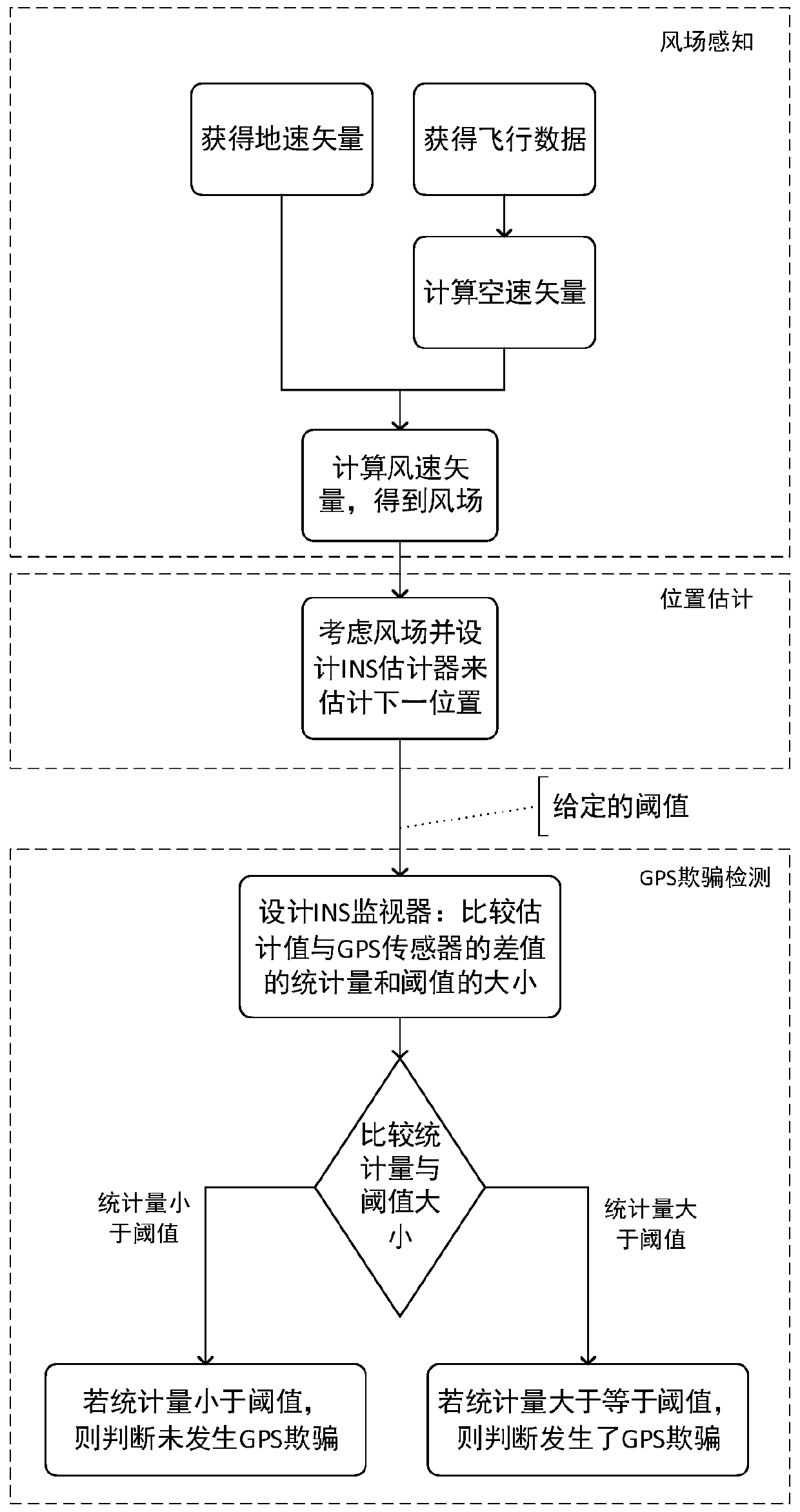
[0067] The invention discloses a method for judging GPS spoofing by a single UAV based on Kalman filtering under wind field interference; it includes three steps of wind field perception, position estimation, and GPS spoofing detection, and its calculation idea is: through the real-time data of the sensor Wind conditions can be obtained. The wind field conditions will affect the position estimation based on the inertial navigation module. After the wind field conditions are known, the influence of the wind on the position estimation can be eliminated, so that the reliability of the final judgment result about whether GPS spoofing occurs is more reliable. high. see figure 1 , the specific process of the present invention is: in the wind field sensing stage, the UAV obtains the ground speed vector, the air speed vector and the wind vector of the UAV according to the GP...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More