

Distributed formation method of unmanned aerial vehicle cluster based on reinforcement learning
A technology of reinforcement learning and unmanned aerial vehicles, applied in the direction of non-electric variable control, instruments, control/regulation systems, etc., can solve the problems of unmanned aerial vehicle swarm formation damage, modeling ability impact, and inability to effectively unify swarm behavior
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. the embodiment. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
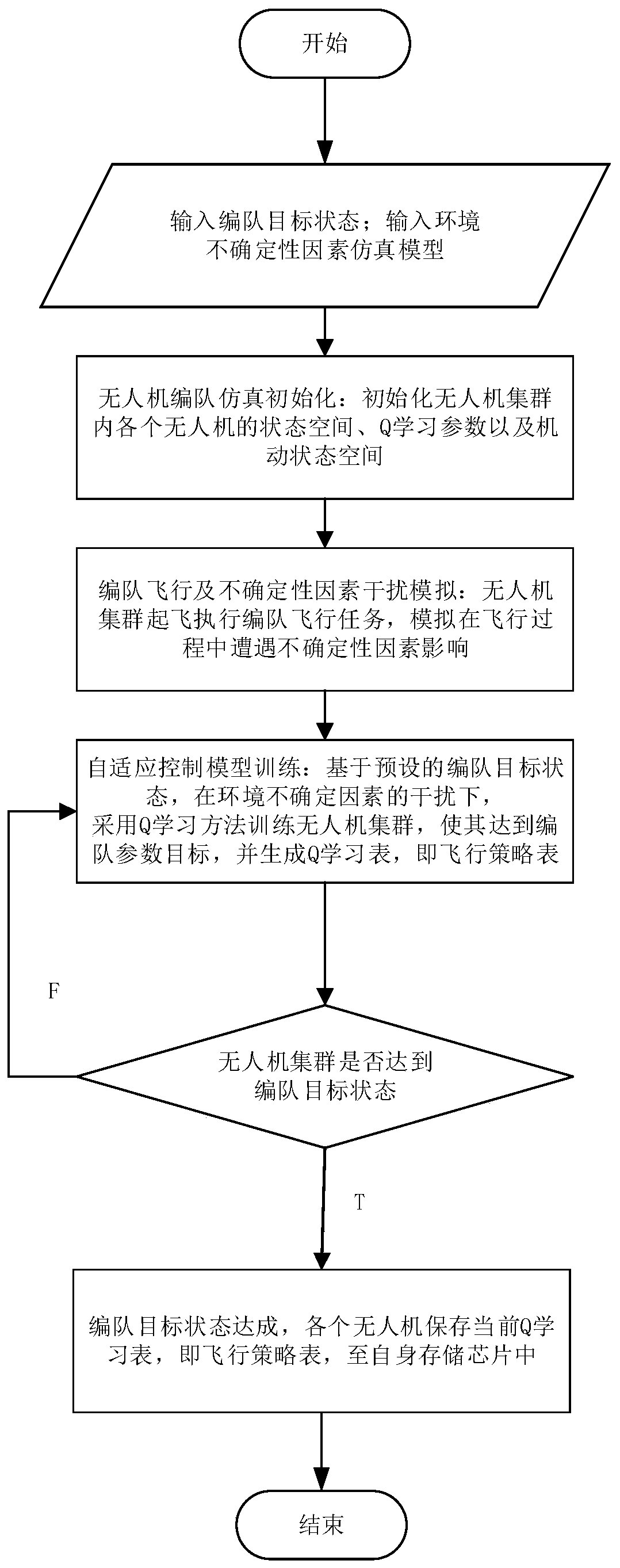
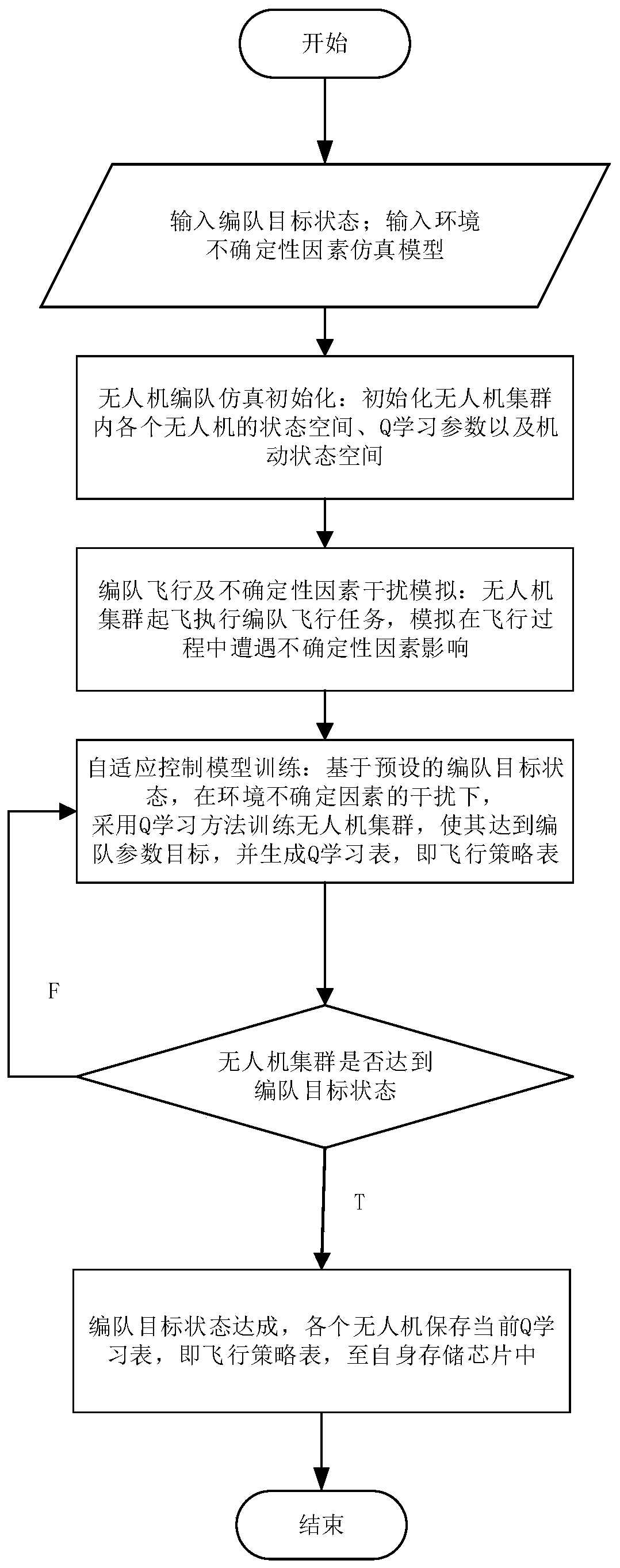
[0066] like figure 1 Shown, as a certain preferred embodiment of the present invention, a kind of unmanned aerial vehicle cluster distributed formation method based on reinforcement learning comprises the following steps:
[0067] Step 1): Obtain external input, including formation target state function and environmental uncertainty factors simulation model, where the formation ta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More