Road edge identification method and device based on laser point cloud
A laser point cloud and recognition method technology, applied in the field of geographic information, can solve the problems of many obstacle points along the road, low accuracy along the road, poor applicability, etc., to reduce the introduction of obstacle points, reduce noise points, Obstacle points introduce less effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
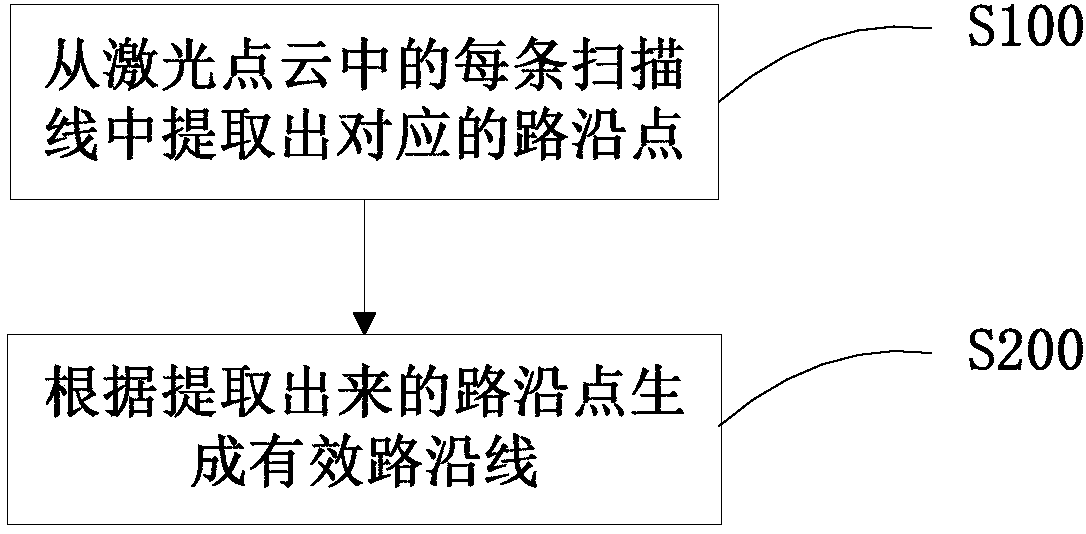
[0085] An embodiment of the present invention provides a roadside recognition method based on laser point cloud, the process of which is as follows figure 1 shown, including the following steps:
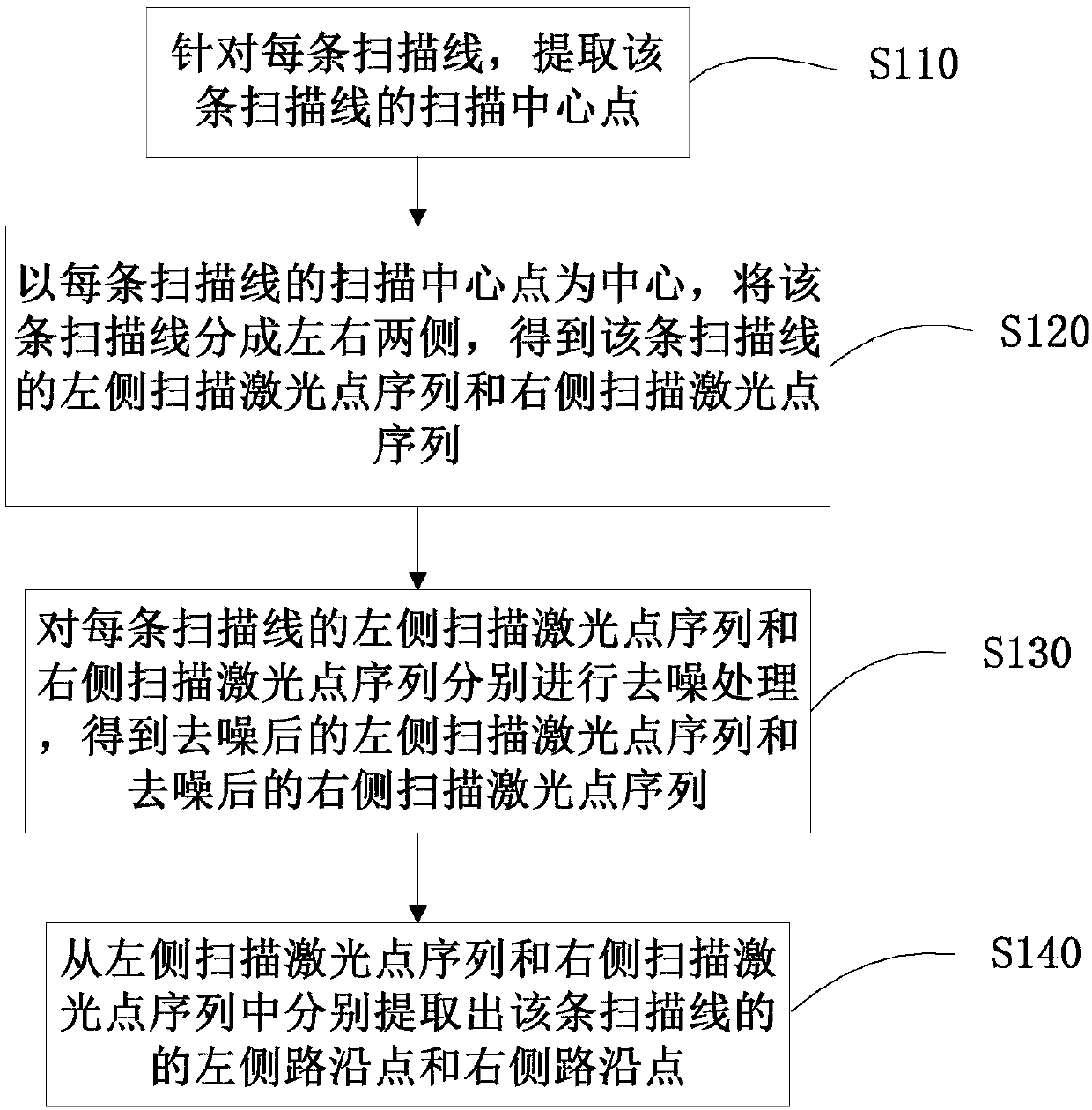
[0086] Step S100: Extract corresponding roadside points from each scanning line in the laser point cloud.
[0087] Such as figure 2 As shown in Fig. 1, the laser point cloud is composed of a large number of laser scanning points, which are organized according to one laser scanning line when stored. Taking a single scan line as the calculation unit, the corresponding roadside points are extracted from each scan line included in the laser point cloud.
[0088] Step S200: Generate an effective roadside line according to the extracted roadside points.
[0089] The extraction of roadside points in this embodiment uses a single scanning line as the calculation unit, which has low computational complexity and a small amount of calculation, and can be applied to large-scale high-precisio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com