

A Backstepping Adaptive Control Method of Fin Stabilizer Hydraulic Servo Simulation Experiment Bench
An adaptive control and hydraulic servo technology, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve the problem of difficult to apply the hydraulic servo simulation test bench control system of the fin stabilizer, and achieve the reduction of nonlinear and The influence of interference factors and the effect of improving the accuracy of tracking control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention is described in detail below:
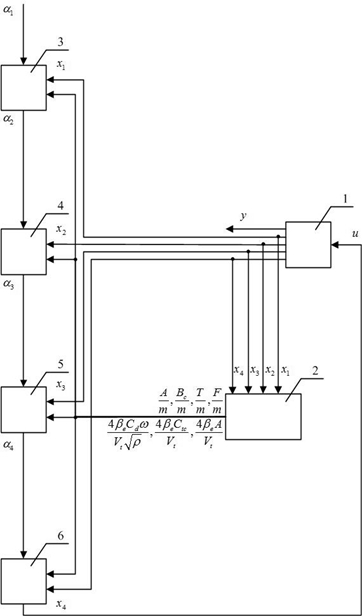
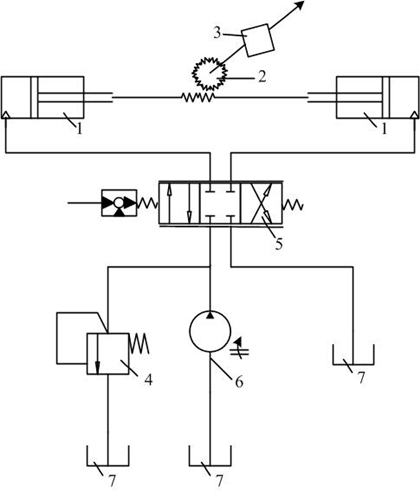
[0018] Such as figure 1 and 2 As shown, a backstepping adaptive control method of a fin stabilizer hydraulic servo simulation test bench of the present invention includes a mathematical model (1) of a fin stabilizer hydraulic servo simulation test bench (1), an adaptive parameter identifier (2), and a backstepping subsystem control Device 1(3), backstepping subsystem controller 2(4), backstepping subsystem controller 3(5), backstepping subsystem controller 4(6).
[0019] The control input u of the three-position four-way electro-hydraulic servo valve passes through the mathematical model of the fin stabilizer hydraulic servo simulation test bench (1) to generate the system output hydraulic cylinder piston displacement y and the system state variable x of the fin stabilizer hydraulic servo simulation test bench 1 、x 2 、x 3 and x 4 , the system state variable x of the fin stabilizer hydraulic servo simulation test...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More