

Jellyfish magnetic control miniature soft robot and preparation method and driving method thereof
A robot, jellyfish-like technology, applied in micro manipulators, underwater operation equipment, manipulators, etc., can solve the problems of no movement mode, limited structure design of robots, single function, etc., to achieve easy control, high biomorphic simulation characteristics, The effect of simple structure and production process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the following embodiments in no way limit the present invention.
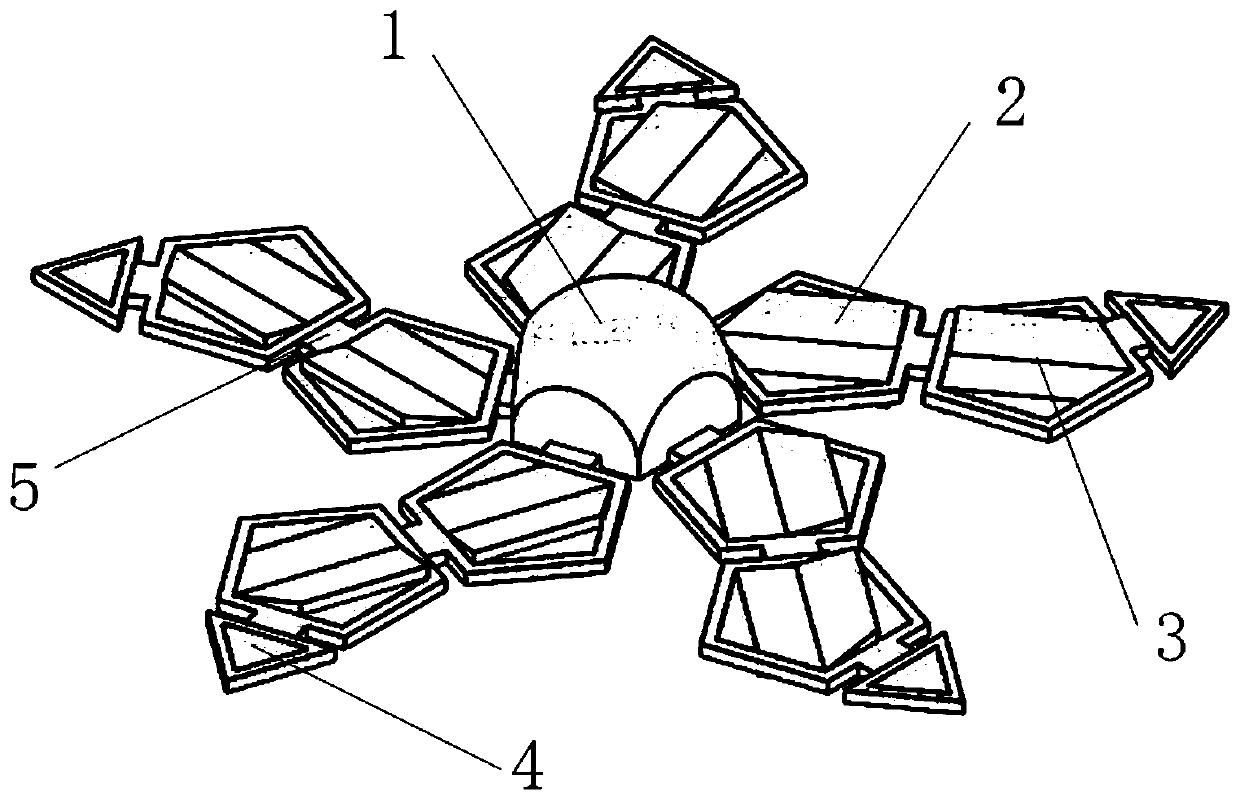
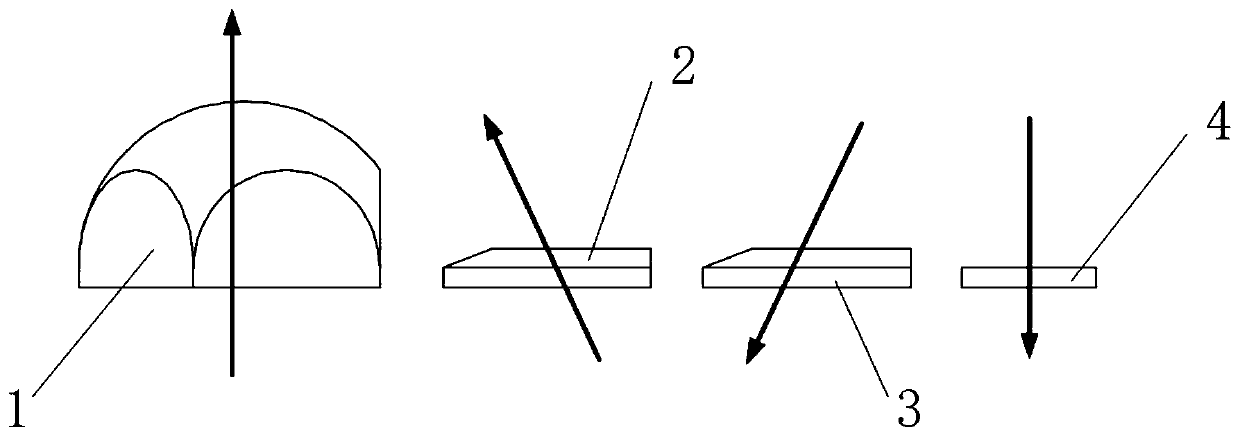
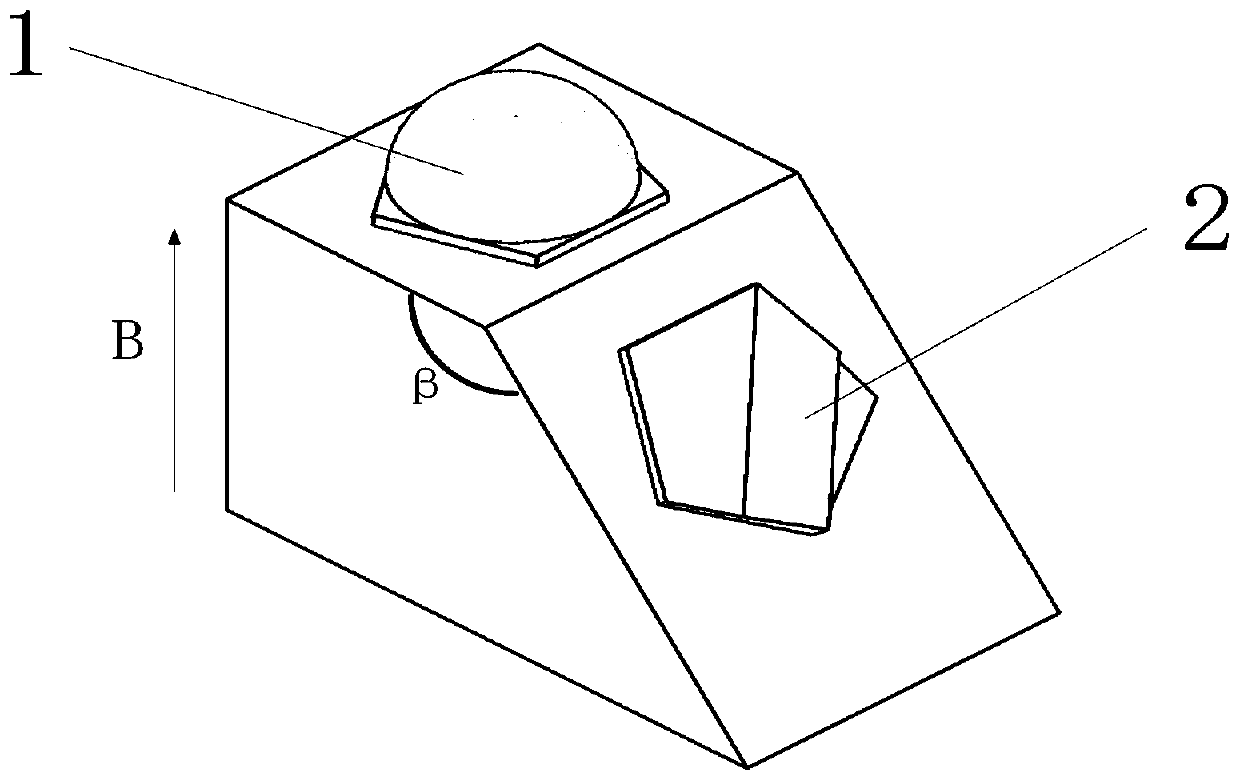
[0039] Such as figure 1 As shown, the jellyfish-like magnetically controlled micro-soft robot includes a head 1 located on the same plane and five movable arms that are evenly distributed in the circumferential direction of the head 1 and arranged radially; the structures of the five movable arms are exactly the same, all It includes an upper arm 2, a forearm 3 and a hand 4; wherein, the head 1, the upper arm 2, the forearm 3 and the hand 4 are sequentially connected by elastic tendons 5, and the two elastic tendons 5 connected to the upper arm 2 are located on the upper arm 2. On two adjacent side walls; the two elastic tendons 5 connected to the forearm 3 are located on two non-adjacent side walls on the forearm 3 . in,
[0040] The head 1, the upper arm 2, the forearm 3 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More