

Front and rear blade edge robot abrasive belt grinding and polishing step optimization method
A technology for robotic abrasive belts, optimization methods, used in belt grinders, grinding/polishing equipment, grinders, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Below in conjunction with accompanying drawing and specific embodiment the present invention will be described in further detail:
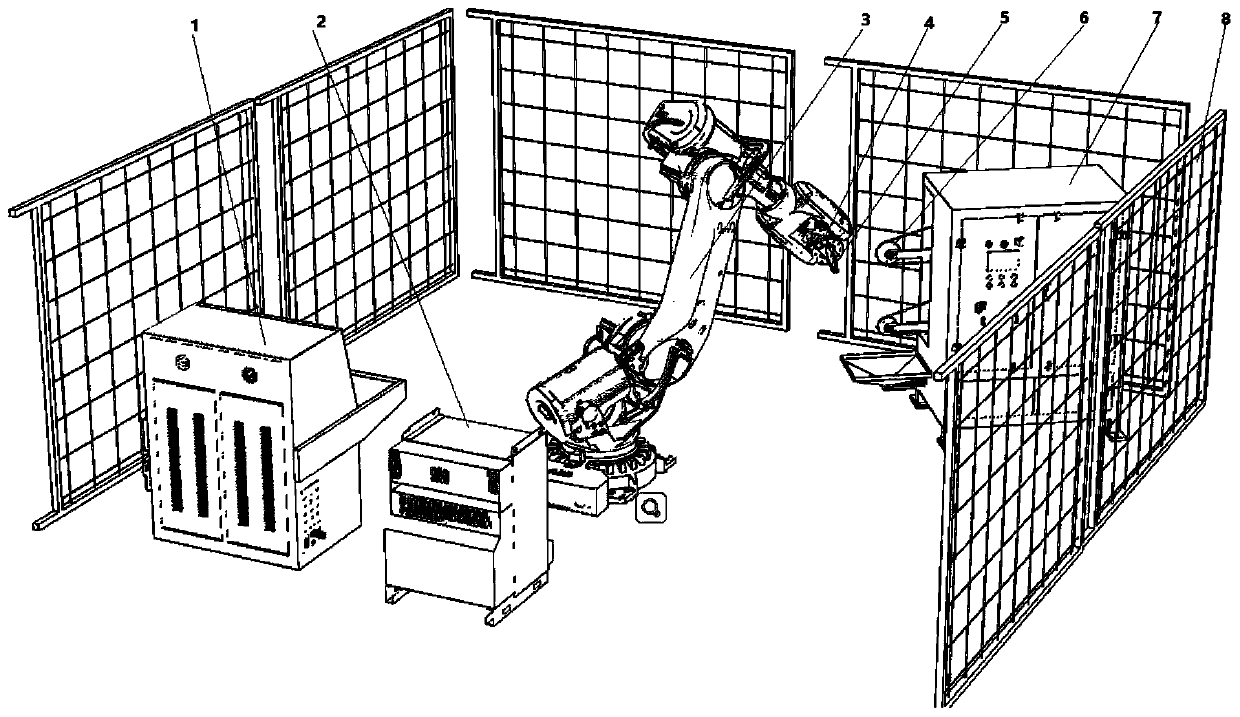
[0040] Such as Figure 1-Figure 7 As shown, the existing robotic abrasive belt grinding and polishing system includes a force-controlled robot and a grinding mechanism. The force control robot includes a robot body 3 , a robot control cabinet 2 , a force control unit 4 installed at the end of the robot, and a clamped workpiece 5 . The grinding mechanism is mainly used for grinding the processing surface of the workpiece.
[0041] In the embodiment of the present invention, such as figure 1 As shown, the grinding mechanism includes an abrasive belt grinding and polishing machine 6 and a grinding and polishing machine control cabinet 7 . The abrasive belt grinding and polishing machine is mainly used for grinding and polishing the processed surface, and the grinding and polishing machine control cabinet is mainly used for controlling the g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More