

A multi-axis linkage pipeline interpolation full-closed-loop motion control method
A technology of motion control and multi-axis linkage, applied in the direction of digital control, electrical program control, etc., can solve the problem of complex transmission device structure diversification with distribution shaft, multi-axis linkage motion control, semi-closed-loop control system can not control the axis of the machine tool The transmission error error of the transmission mechanism, the motion control method cannot be well applied, etc., to achieve the effect of avoiding the abnormal movement of the shaft, ensuring the accuracy of the contour, and high smoothness of the speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
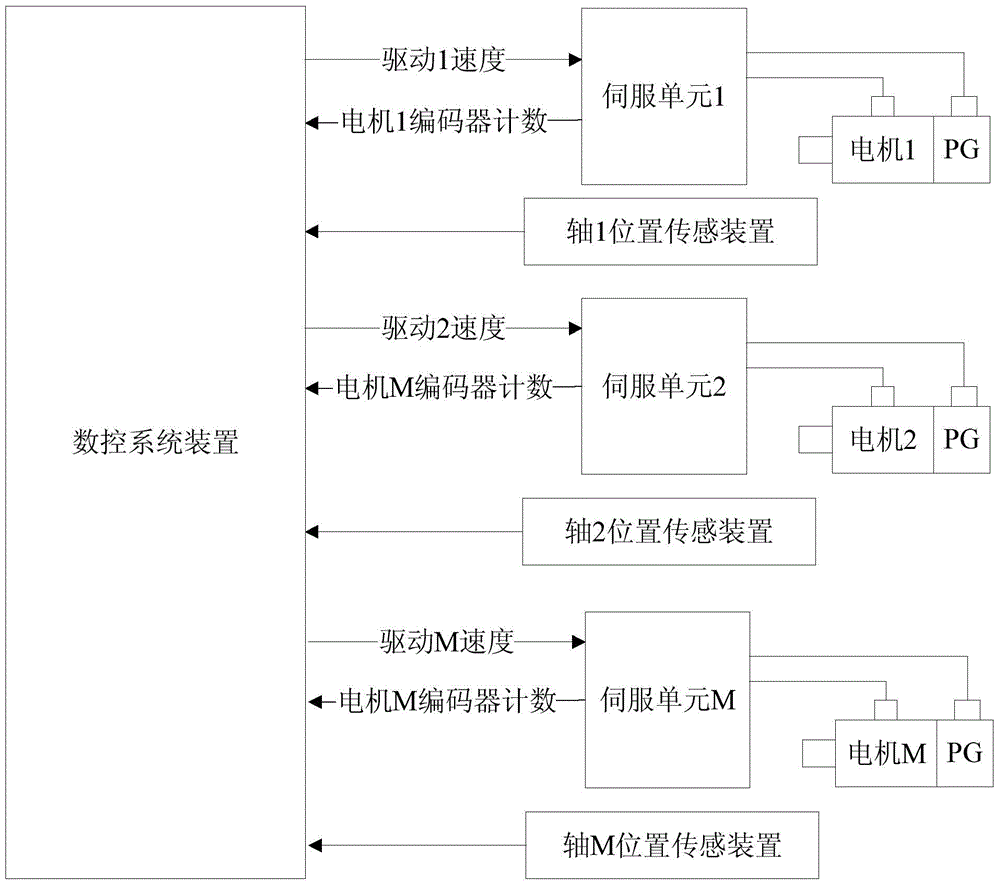
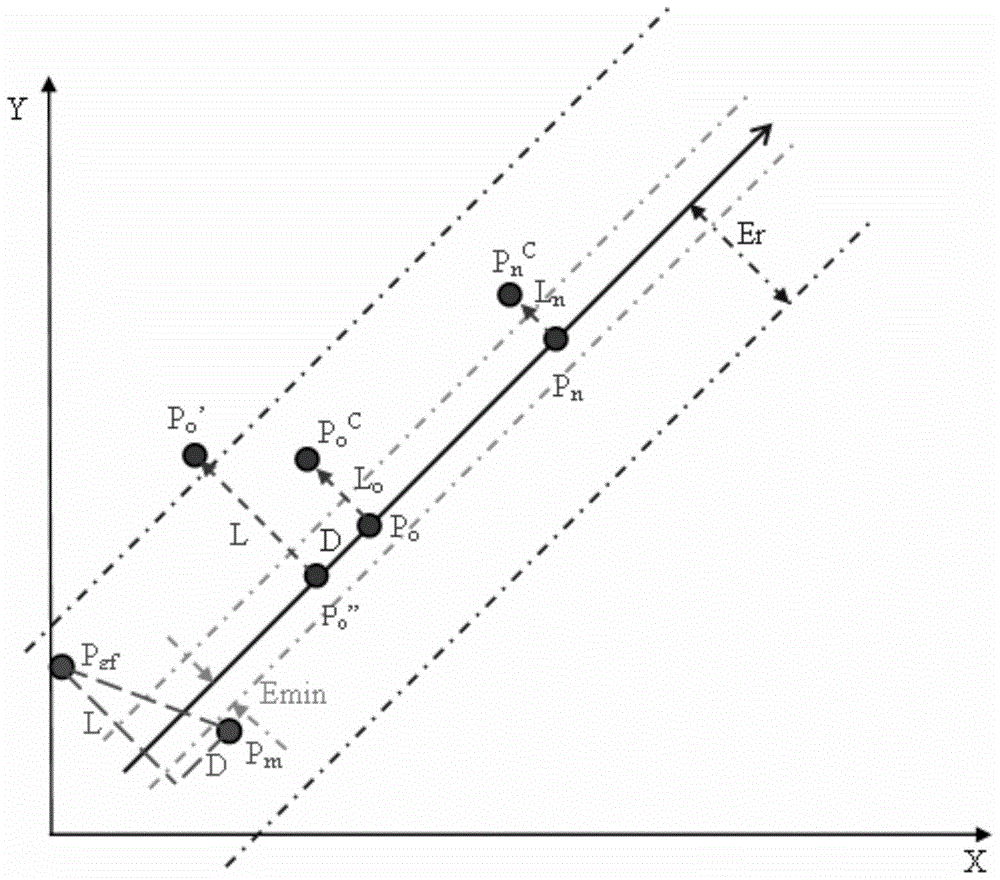
[0026] A multi-axis linkage pipeline interpolation full-closed-loop motion control method, using the servo motor encoder feedback of each axis and the machine tool position sensing device for the motion command to re-obtain the corrected motion trajectory point through the dynamic correction method for the planned motion trajectory point, through The acceleration and deceleration method obtains a new trajectory interpolation point, and then uses this interpolation point as the center of the circle, takes the maximum contour allowable error as the pipeline radius, and takes the motion direction as the normal vector, and performs internal calculation of the new trajectory interpolation point through the double feedback deviation. The offset planning further obtains the target position point of the space trajectory, and the axis control part reali...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More