

Flexible robot posture measurement method and device
A pose measurement and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor movement flexibility, limited movement space, unsuitable for unstructured environments, etc., to increase hardware costs and reduce Cost, effect of widespread application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
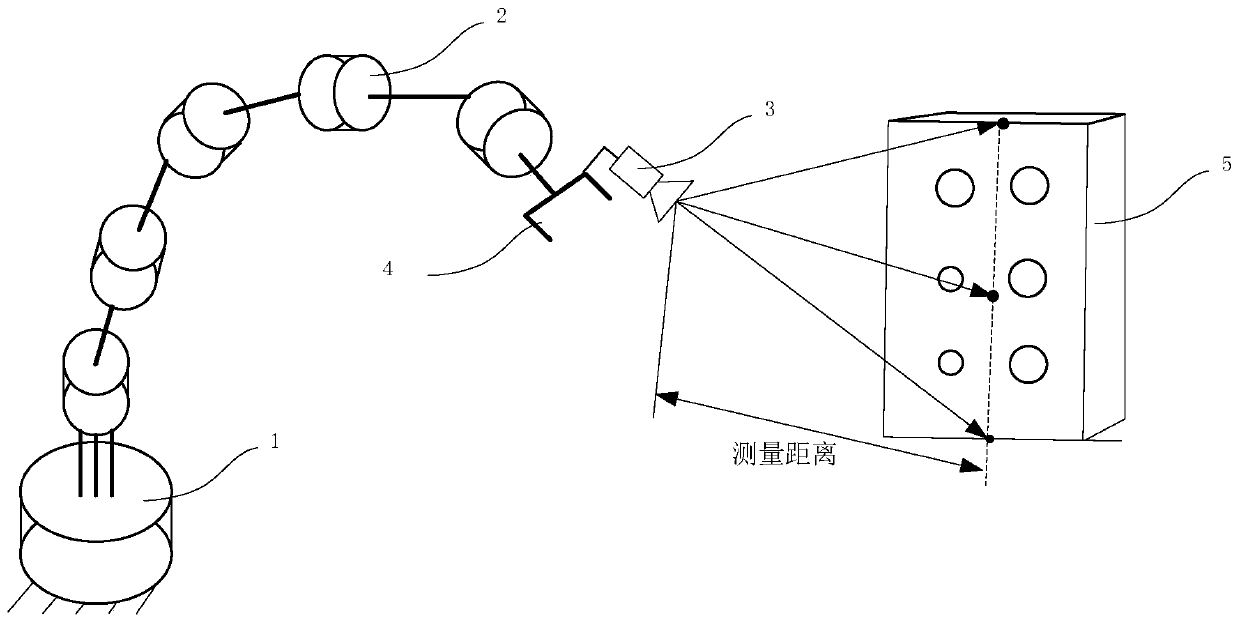
[0048] This embodiment provides a flexible robot, such as figure 1 Shown is a schematic diagram of the flexible robot of this embodiment. As can be seen from the figure, the flexible robot of this embodiment includes a flexible robot body, a vision measuring device 3, and a flexible robot end effector 4. The flexible robot body includes a base 1 and a flexible machine Arm 2, in this embodiment, the end effector of the flexible robot is a charging head docking device, that is, a charging socket, and the vision measurement device may be a monocular camera, which is used to collect the vision measurement image of the target 5, and this function can be realized. All of the visual measuring equipment are within the protection scope of this embodiment.
[0049] In this embodiment, by introducing a flexible robot, the existing smart charging robot has limited movement space, poor movement flexibility, and is not suitable for an unstructured environment, thereby increasing the working spa...
Embodiment 2
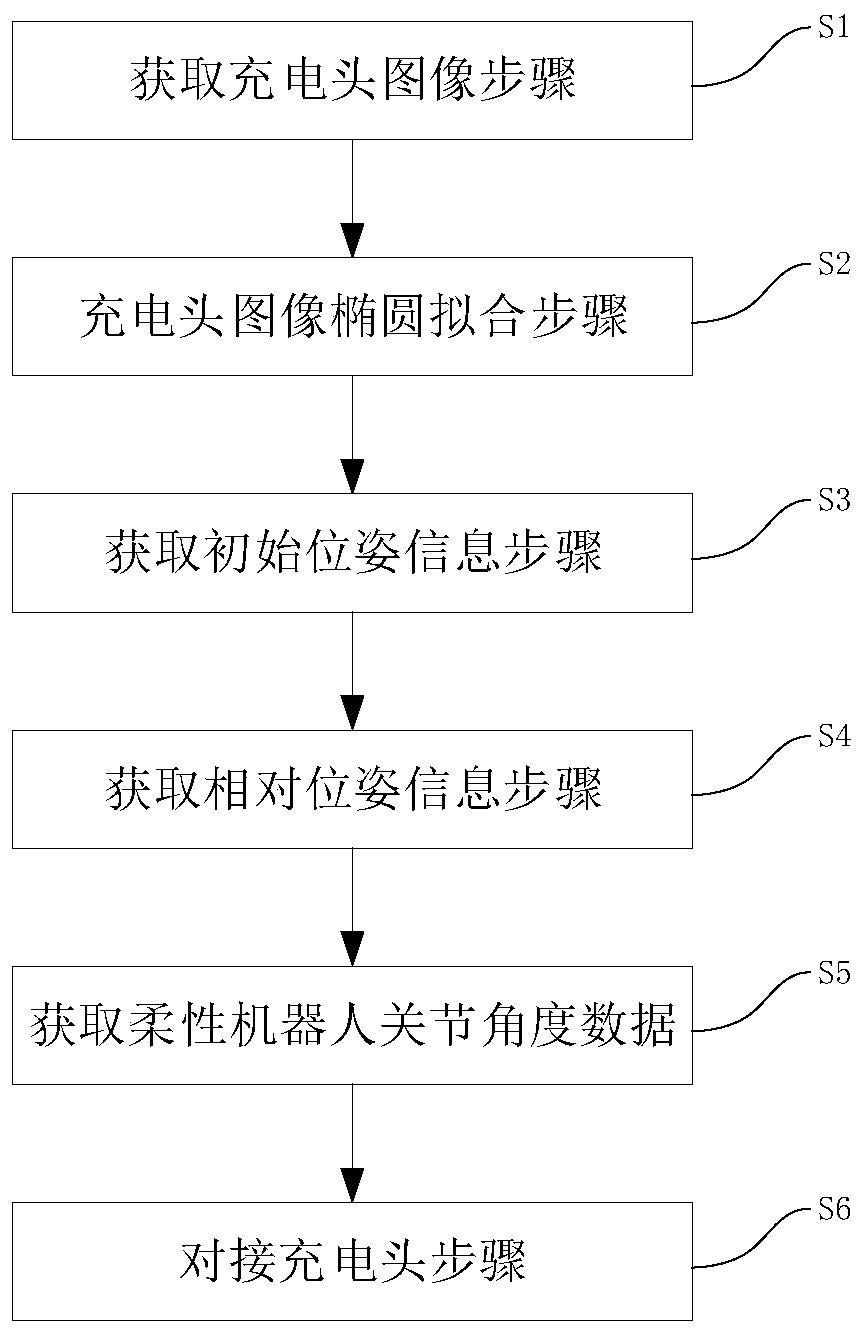
[0052] The second embodiment of the present invention provides a method for measuring the pose of a flexible robot. figure 2 This is an implementation flowchart of a flexible robot pose measurement method provided by an embodiment of the present invention, such as figure 2 As shown, the method can include the following steps:
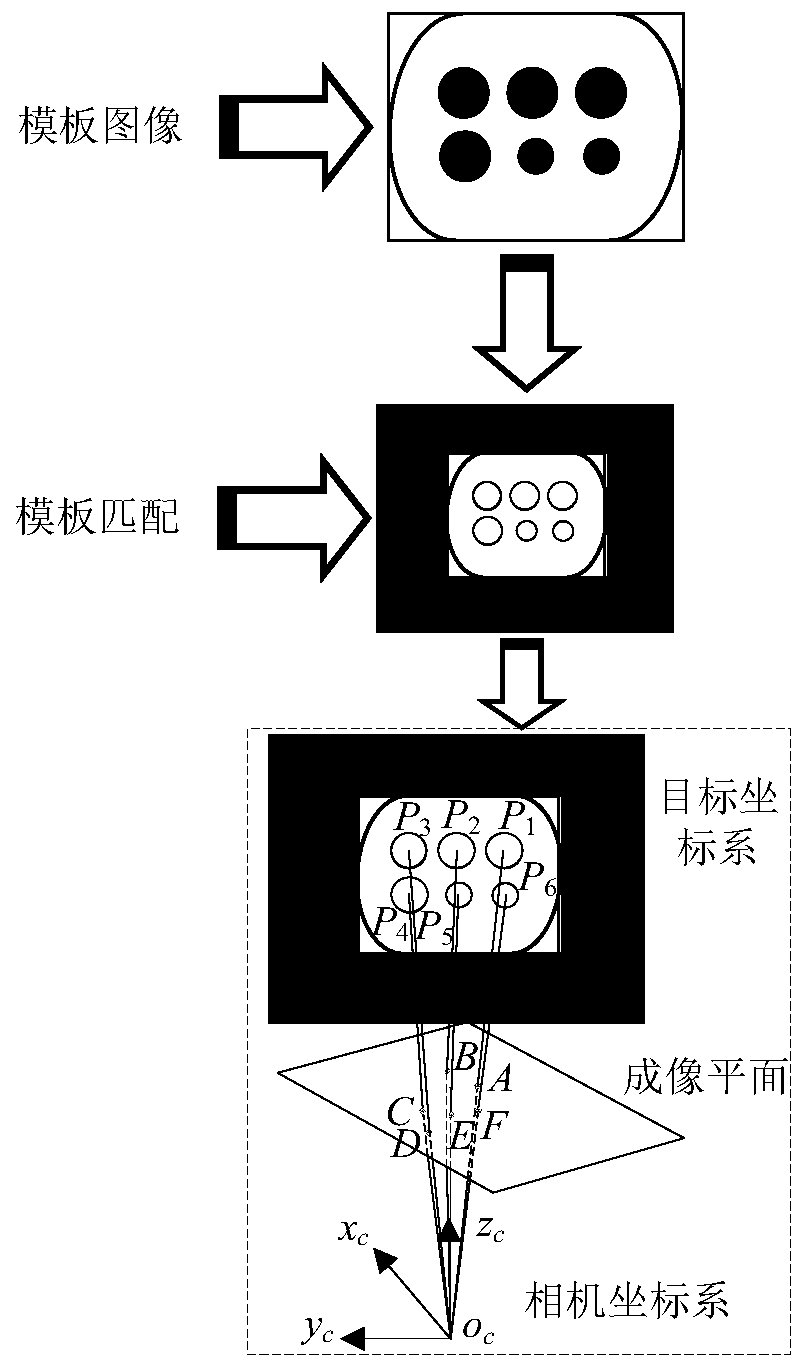
[0053] S1: Acquire the charging head image: Collect the charging head image through the visual measuring device on the end effector of the flexible robot, such as figure 1 The object shown in the figure, namely the appearance characteristics of the charging head, can be seen that its surface has six coplanar cylinders. Therefore, the image of the charging head in this embodiment includes multiple circular cross-sections, that is, the circle in this embodiment. surface.
[0054] After the collected charging head image, the template image is obtained, and then the collected charging head image is template matched according to the template matching algorithm t...
Embodiment 3
[0151] Such as Figure 7 As shown, the structure block diagram of a flexible robot pose measurement device provided by this embodiment includes:
[0152] Acquiring the charging head image module: used to collect the charging head image through the visual measurement device on the end effector of the flexible robot. The charging head image includes multiple circular surfaces, and the circular surface is the cross section of the cylinder on the charging head.
[0153] The charging head image ellipse fitting module: used to perform ellipse fitting on a circular surface according to the least squares ellipse fitting method to obtain multiple ellipses.
[0154] Obtain the initial pose information module: solve the pose of any two ellipses, obtain multiple sets of reference pose information, select the effective reference pose information according to the constraint conditions, and obtain the initial pose information of the flexible robot according to the effective reference pose informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More