

Lane line updating method, device, equipment and system and readable storage medium
An update method and technology of lane lines, applied in the field of high-precision maps, can solve problems such as incorrect update of lane lines
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
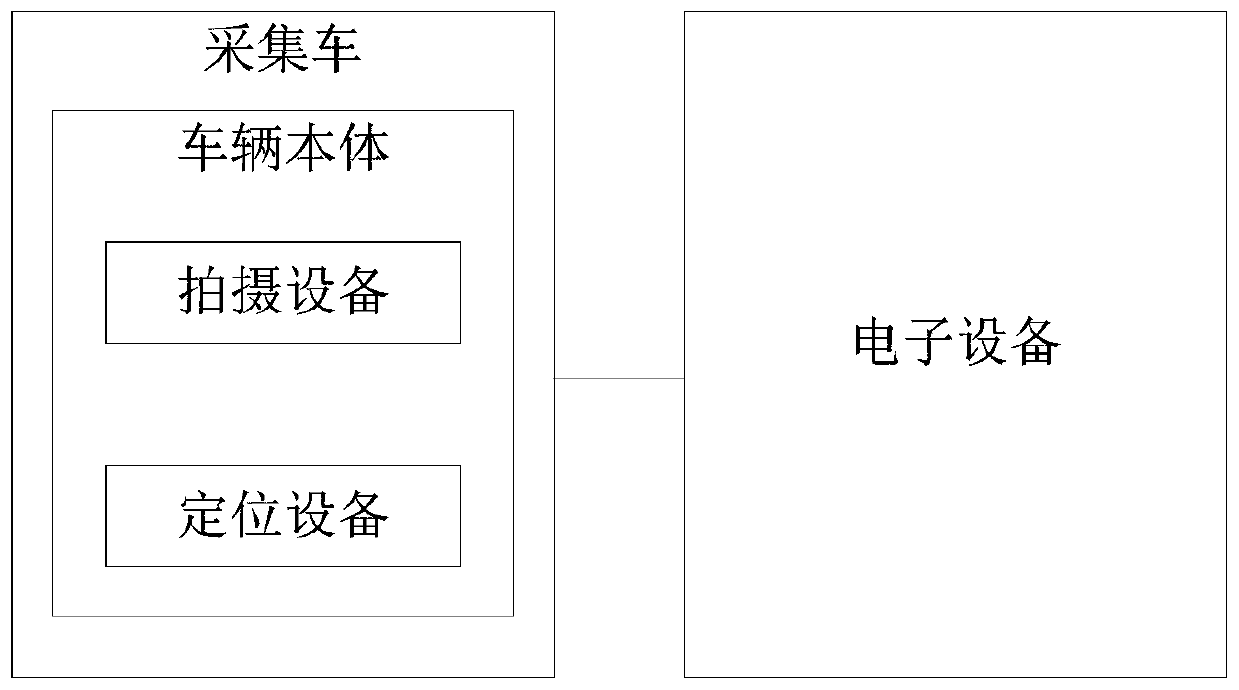
[0041] In order to clearly introduce the technical solutions of the embodiments of the present invention, based on Figure 1a A schematic structural diagram of a lane line updating system applicable to an embodiment of the present invention is introduced. Figure 1a Among them, the lane update system mainly includes electronic equipment and collection vehicles.
[0042] Collection vehicles include but are not limited to cars, cars, buses and other road vehicles, and can be unmanned vehicles or manned vehicles. The collection vehicle includes: a vehicle body, a photographing device and a positioning device mounted on the vehicle body.
[0043] The photographing device and the positioning device can be arranged on the rearview mirror of the collection vehicle. The photographing device is used to photograph the road in front of the collection vehicle, for example, a wide-angle camera, a fisheye camera, and the like. The positioning device is used for real-time positioning of the...
Embodiment 2
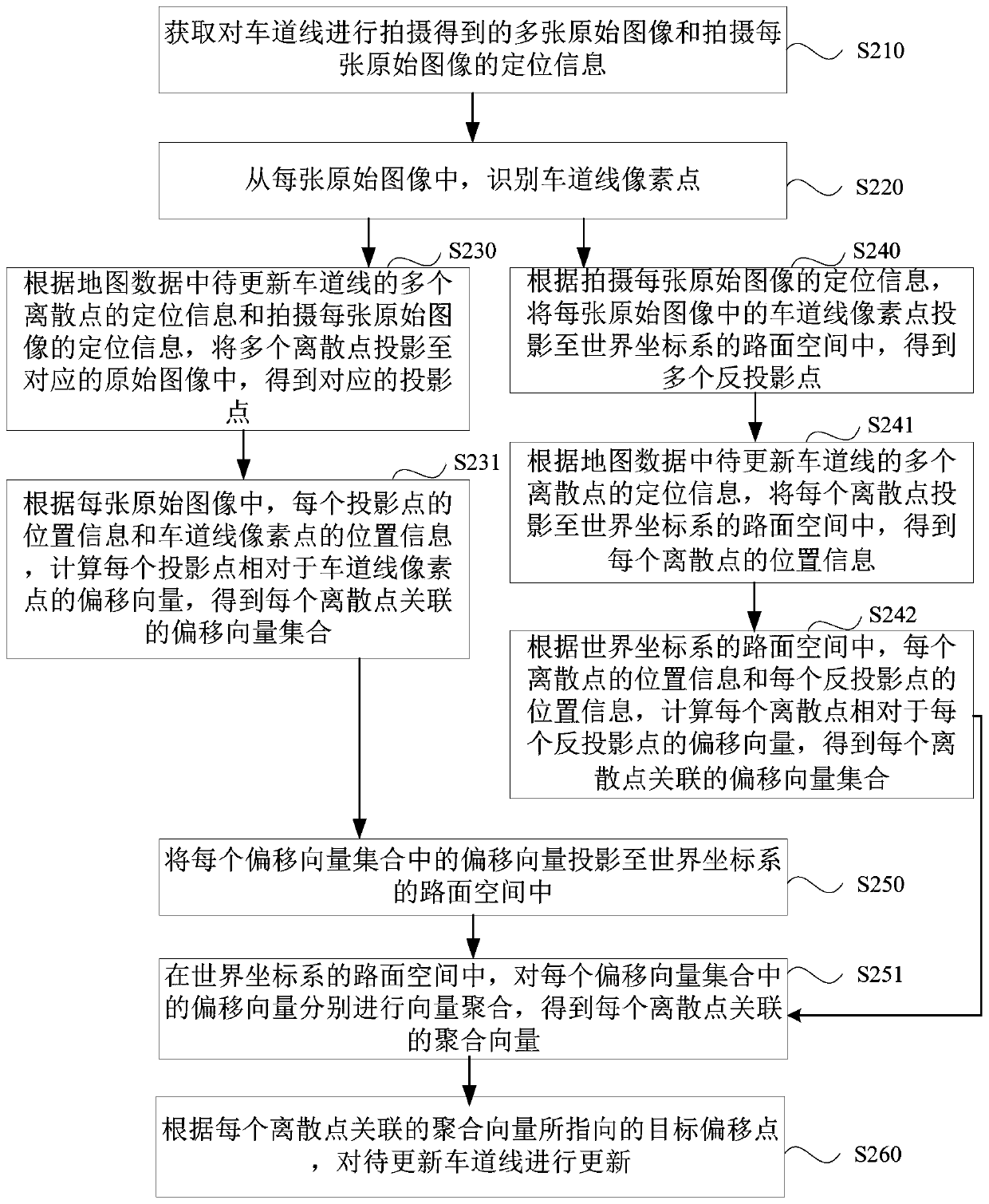
[0067] This embodiment is further optimized on the basis of the optional implementation manners of the foregoing embodiments. Optionally, "according to the positioning information of multiple discrete points of the lane line to be updated in the map data and the positioning information of each original image, calculate the deviation of each discrete point relative to the pixel point of the lane line in each original image According to the positioning information of multiple discrete points of the lane line to be updated in the map data and the positioning information of each original image taken, multiple discrete points are projected To the corresponding original image, the corresponding projection point is obtained; according to the position information of each projection point and the position information of the pixel point of the lane line in each original image, calculate the offset of each projection point relative to the pixel point of the lane line Vector to get the se...
Embodiment 3
[0122] The embodiments of the present invention perform operation optimization on the basis of the technical solutions of the foregoing embodiments. Optionally, the operation "perform vector aggregation on the offset vectors in each set of offset vectors to obtain the aggregation vector associated with each discrete point" is optimized as "aggregate the offset vectors in each set of offset vectors Add vectors to get the aggregation vector associated with each discrete point", or, optimize to "calculate the projection of the lane line pixel corresponding to each offset vector in each offset vector set in the road space of the world coordinate system point; according to the positioning information of each projection point and the positioning information of the original image where each projection point is located, calculate the distance between each projection point and the shooting point of the corresponding original image; according to each projection point and the correspondin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More