

A quick-disconnect and quick-connect mechanism for a split robot
A robot and split-type technology, applied in the field of robots, can solve the problems of complex structure and easy damage of automatic bayonet, and achieve the effect of improving the running stability, simple and compact structure, and simplified structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in detail below with reference to the accompanying drawings and examples.
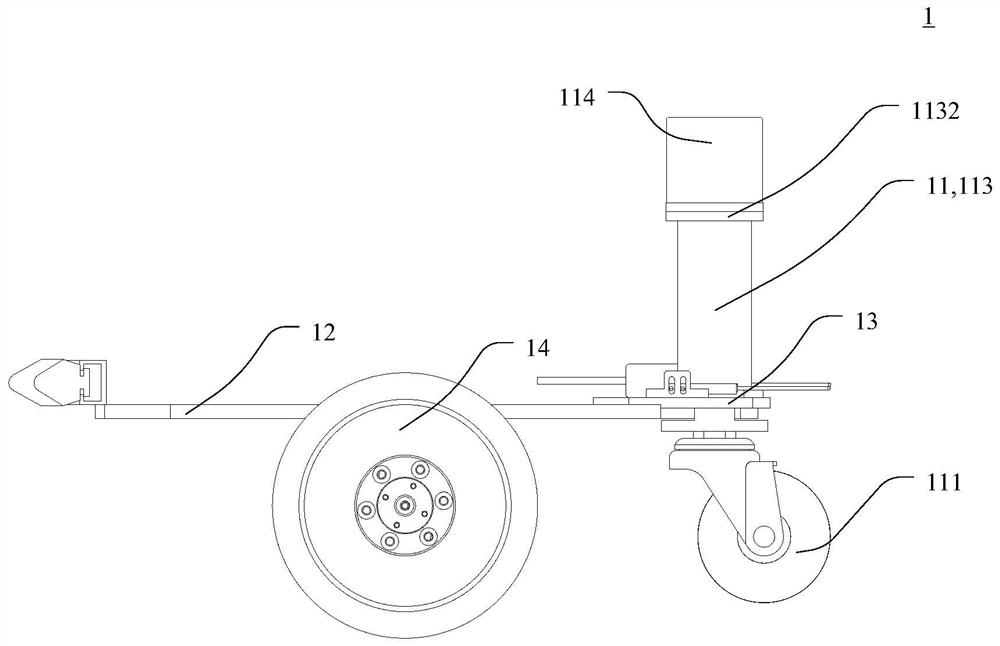
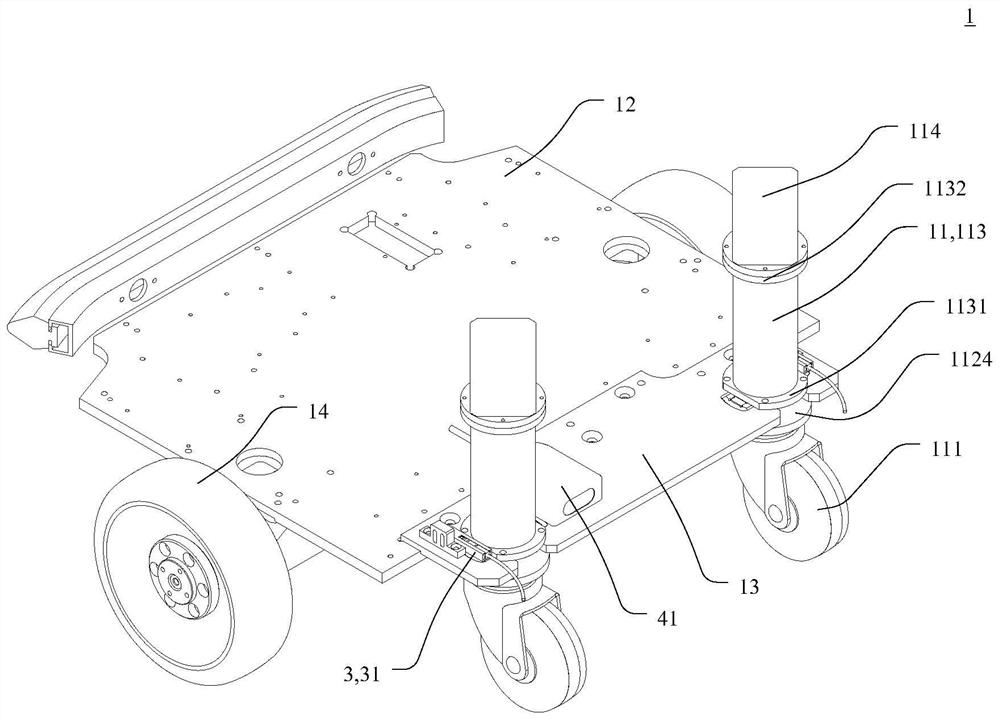
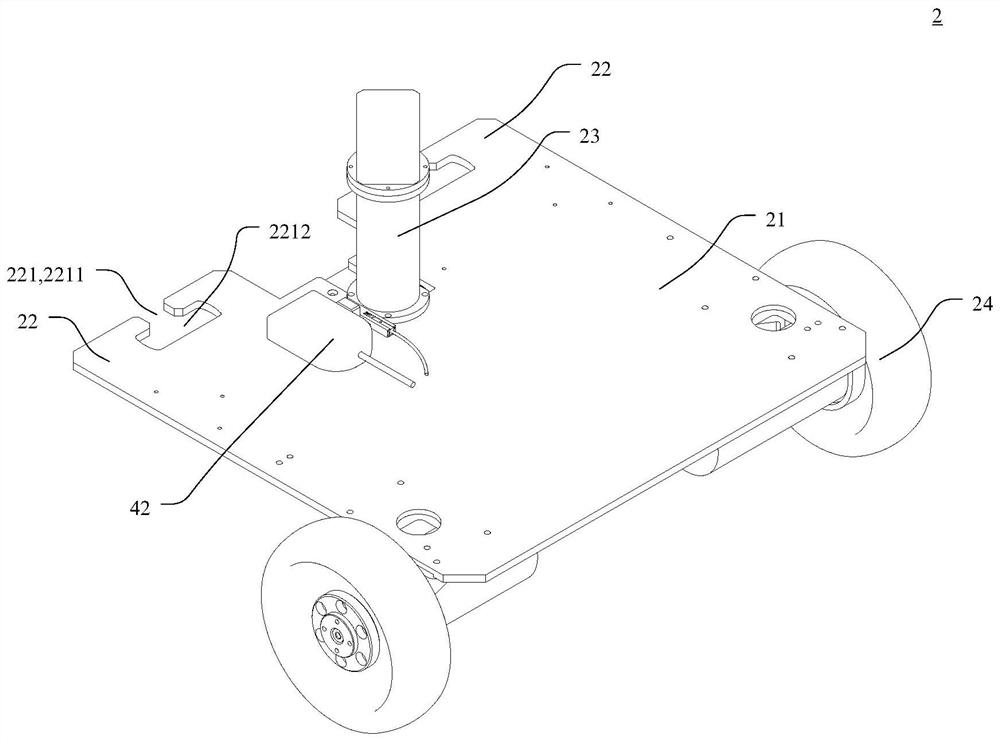
[0039] Such as Figure 1 to Figure 10 As shown, according to an embodiment of the present invention, a quick release and quick connection mechanism of a split robot is provided, and the quick release and quick connection mechanism is used for the first part of the split robot, such as the main engine of the inspection robot, and the second part, such as the inspection robot. The locking and unlocking between the slaves of the robot facilitates the automatic combination and disengagement of the master and the slaves, such as figure 1 and figure 2 As shown, the quick release and quick connection mechanism includes a first wheel assembly 11 arranged on the first part 1. The first wheel assembly 11 includes a first roller 111, which is a walking wheel of the first part 1. The first wheel assembly 11 is configured as a telescopic structure to realize the lif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More