

Vehicle running lane positioning method and device as well as terminal
A vehicle driving and positioning method technology, applied in the field of map navigation, can solve the problems of difficulty in mass production, high-precision maps and lidars are expensive, and achieve the effects of high reliability, ease of mass production and use, and reduced manufacturing costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
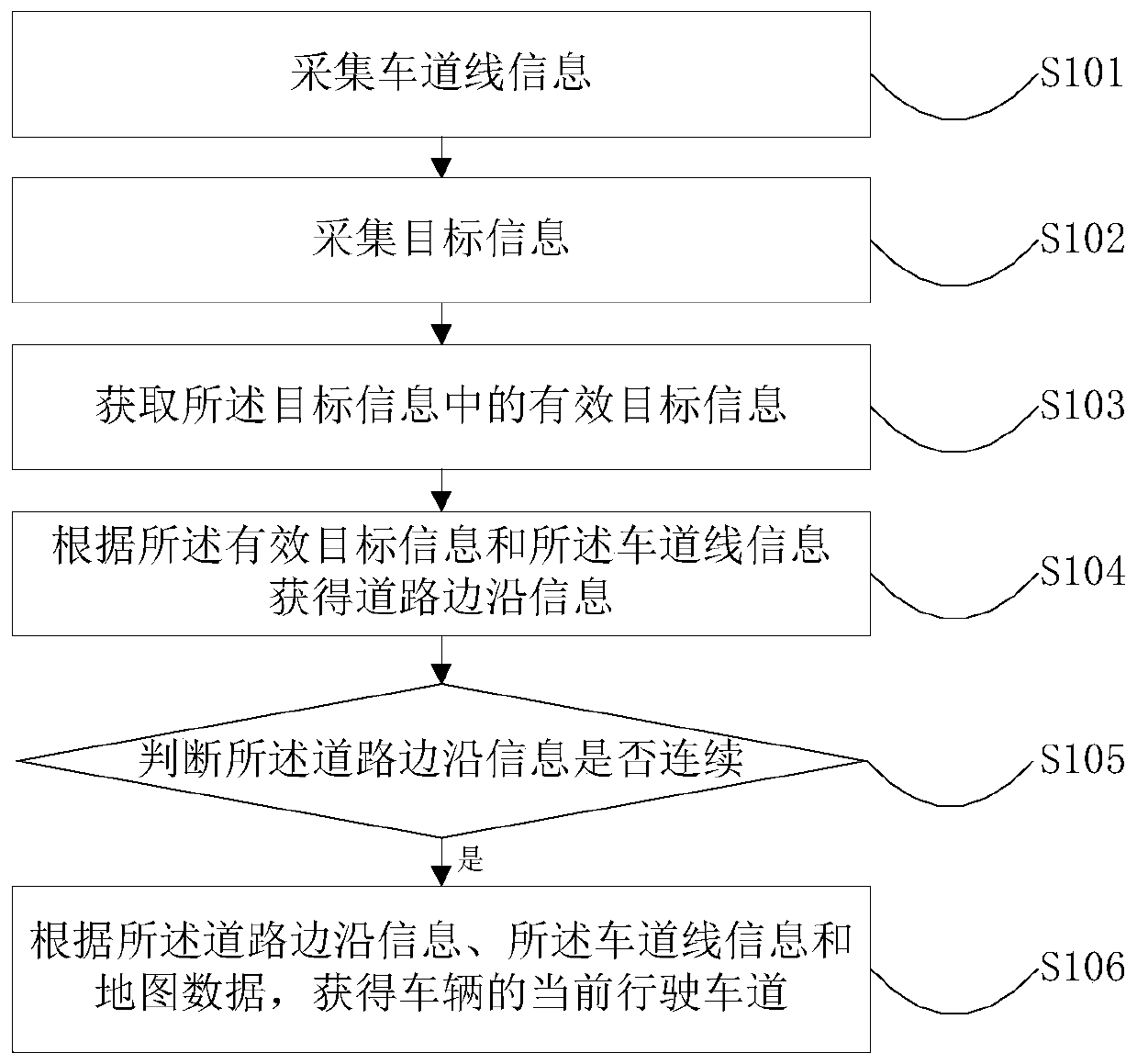
[0094] An embodiment of the present invention provides a vehicle lane positioning method, such as figure 1 As shown, the method includes:
[0095] S101. Collect lane line information;
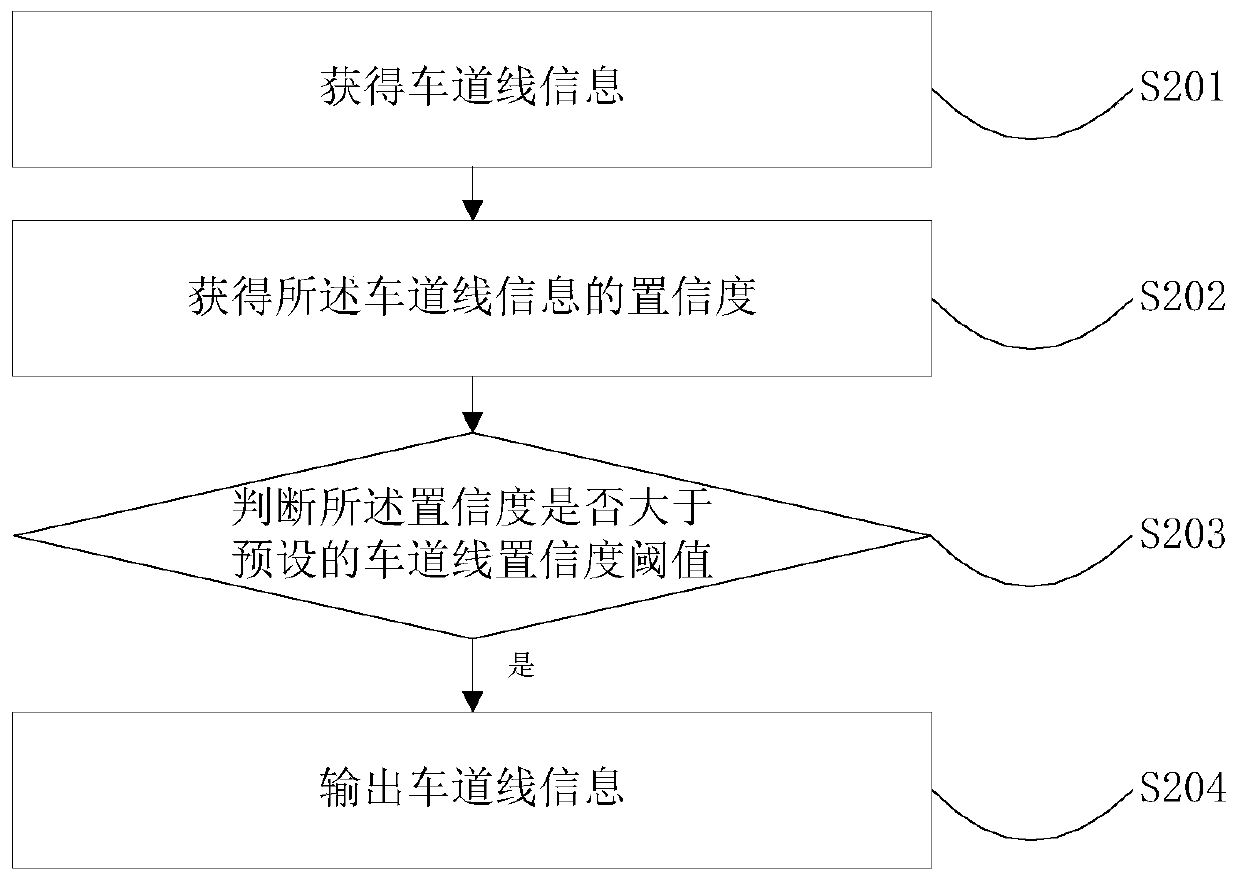
[0096] Further, the collection of lane line information includes:
[0097] S201. Obtain lane line information;
[0098] S202. Obtain the confidence level of the lane line information;
[0099] S203. Judging whether the confidence degree is greater than a preset lane line confidence threshold;
[0100] S204. If yes, output lane marking information.
[0101] Further, before collecting the lane line information, it is judged whether the lane line information can be collected, and if the lane line information cannot be collected, the vehicle lane positioning method cannot be used.
[0102] Specifically, the prerequisite for realizing lane-level positioning in the method is that lane line information can be collected normally. When the lane line information cannot be collected, that is, when t...
Embodiment 2
[0157] A feasible embodiment of the present invention provides a positioning device for a vehicle driving lane. The device includes: a lane line collection module 1301, a target information collection module 1302, a valid target information acquisition module 1303, a road edge information acquisition module 1304, a road edge continuity judgment module 1305, and a lane information acquisition module 1306;
[0158] The lane line collection module 1301 is used to collect lane line information;
[0159] The target information collection module 1302 is used to collect target information;
[0160] The valid target information obtaining module 1303 is used to obtain valid target information from the target information;
[0161] The road edge information obtaining module 1304 is used to obtain road edge information according to the lane line information and the effective target information;
[0162] The road edge continuity judging module 1305 is used to judge whether the road edge ...
Embodiment 3
[0178] An embodiment of the present invention provides a terminal, the terminal includes the above-mentioned device for positioning a driving lane of a vehicle, and the terminal may be a vehicle.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More