

Mobile robot path planning method based on network tearing method
A mobile robot and path planning technology, applied in the field of robotics, can solve problems such as the overall application is not very successful, the process is complex, and the path planning accuracy is poor.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0061] The present invention will be described in detail below in combination with specific embodiments.
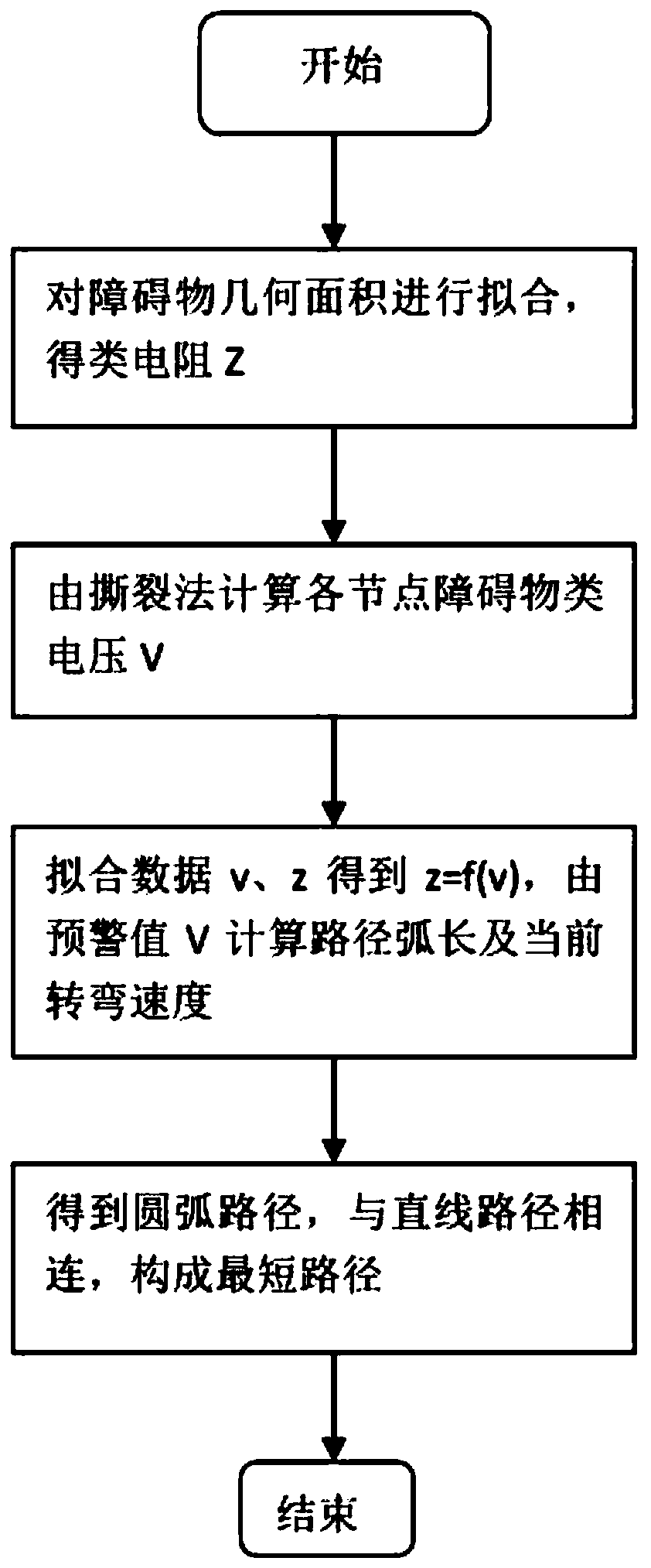
[0062] The present invention is based on the mobile robot path planning method of the network tearing method, such as figure 1 As shown in Fig. 1, the basic driving route is the line from the starting point to the target point, and the obstacle network model is established by using the network tearing method, and the sub-network is torn out, and the minimum path and time of the mobile robot are calculated by mathematical fitting. The weight value is used to obtain the optimal path planning for the mobile robot to reach and bypass the next obstacle, and to adjust the basic route, which specifically includes the following steps:
[0063] Step 1) Find out the geometric center of the obstacle, take the geometric center of the obstacle as the origin, take the distance from the geometric center of the obstacle to the farthest boundary point as the radius, and make the circumscr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More