

Height measurement method and device of highway height permitted frame for vehicle based on binocular vision
A technology of binocular vision and height measurement, which is applied in the direction of measuring device, line-of-sight measurement, and distance measurement, etc., and can solve problems such as casualties, height limit and vehicle damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
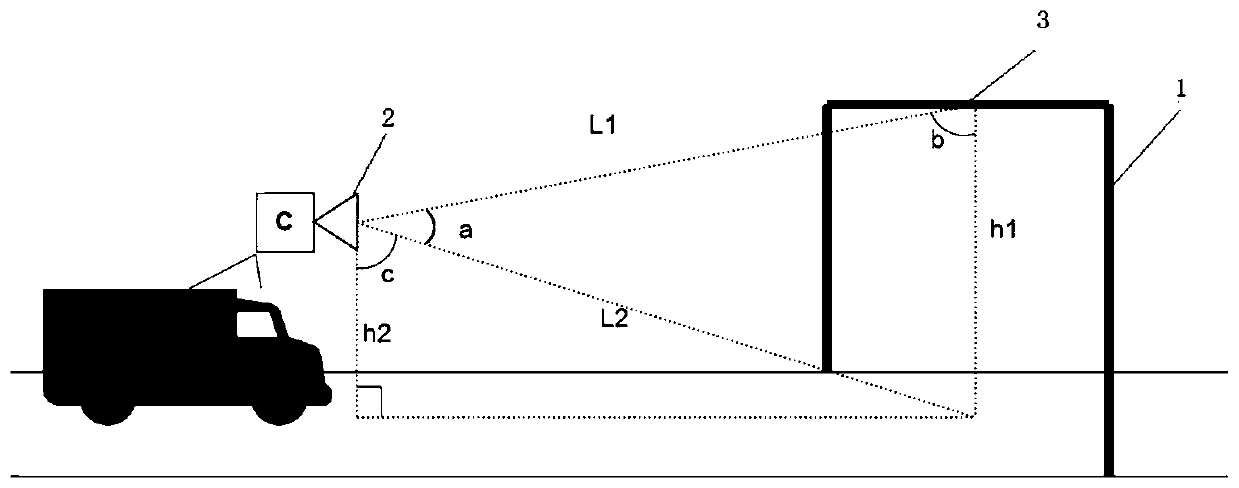
[0080] A binocular vision-based method for measuring the height of a vehicle-use highway elevation limit. With two wide-angle cameras, the binocular vision system is used to perform real-time photography, tracking and positioning of the height-limited crossbeam target. The binocular vision system is used during vehicle driving. Real-time measurement of the distance from the vehicle and the relative roof height of the height-limited vehicle, and provide early warning information for the driver, including the following steps:
[0081] (1) Calibrate the parameters of the binocular camera,
[0082] The binocular vision system installed on the roof of the car selects two cameras with the same internal parameters. First, the internal parameters of a single camera are calibrated for one of the cameras; the relative position between the two cameras is measured through calibration, and the light The axes are parallel to each other, and the horizontal axes of the camera coordinate syste...
Embodiment 2
[0089] The difference between this embodiment and embodiment 1 is:
[0090] Step (1) carrying out parameter calibration to binocular camera further comprises the following steps:
[0091] (1.1) Single camera parameter calibration
[0092] The binocular vision system selects two cameras with the same internal parameters. First, the internal parameters of a single camera are calibrated for one of the cameras;
[0093] Step (1.1) single camera parameter calibration further includes the following steps:
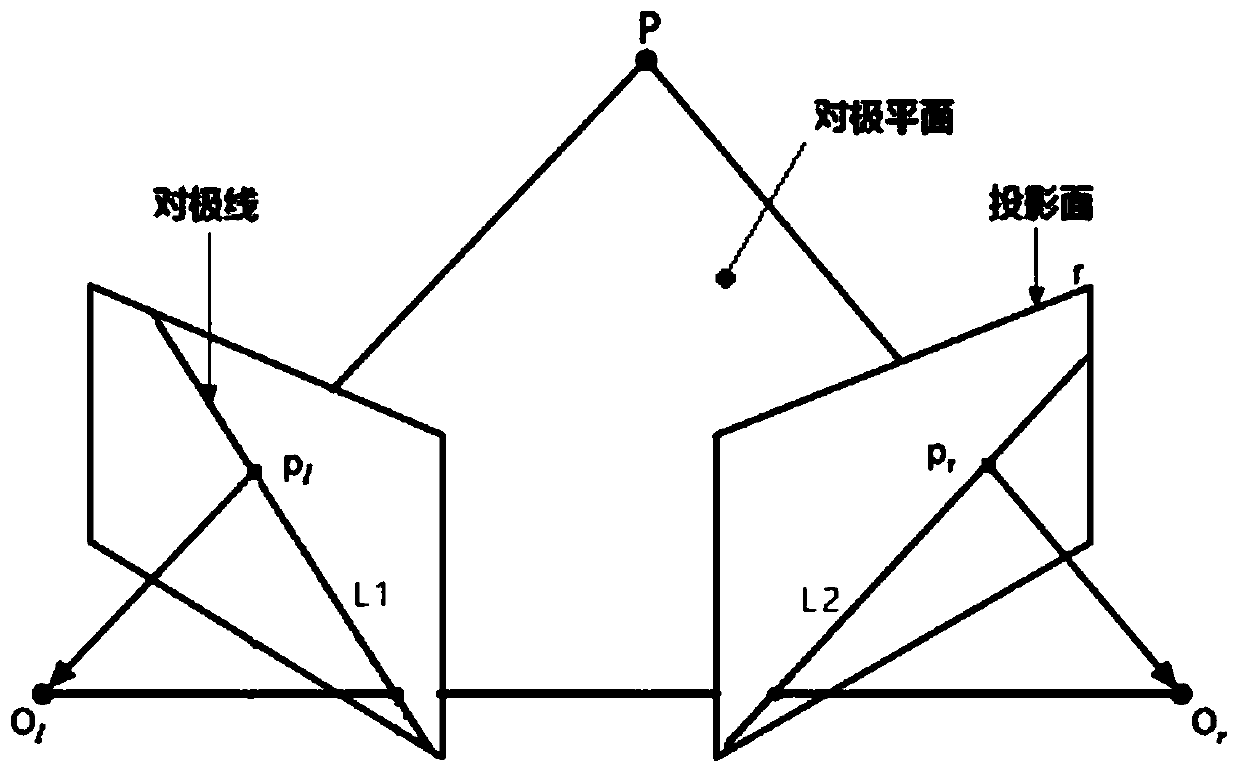
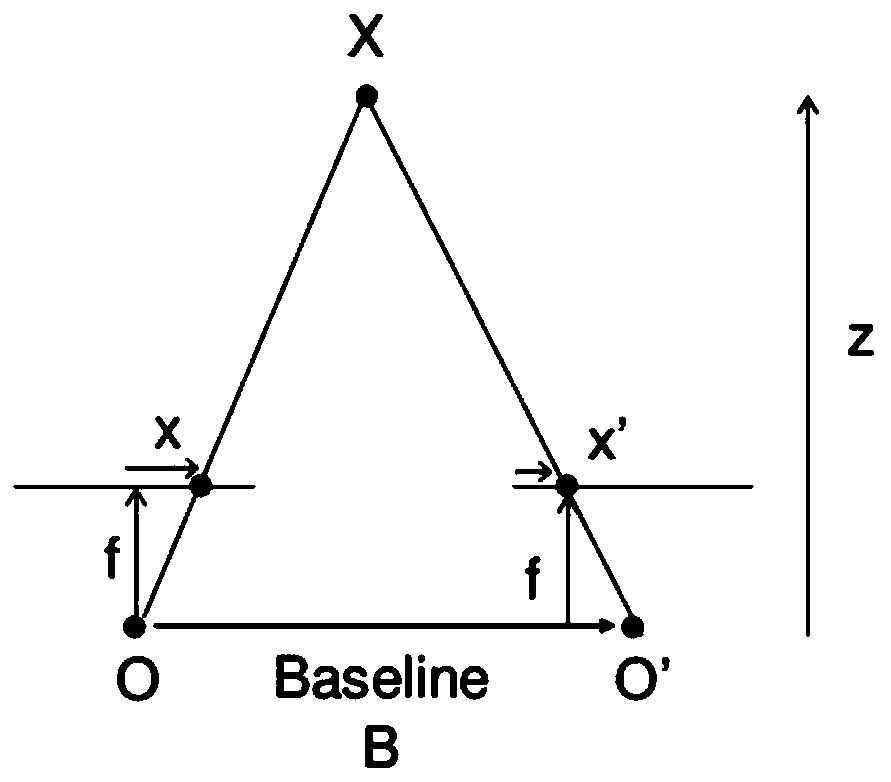
[0094] Let P=(X, Y, Z) be a point in the scene, in the pinhole camera model, it needs to go through the following transformations, and finally becomes the image point p=(μ, v) on the two-dimensional image,
[0095] d) Transform P from the world coordinate system to the camera coordinate system through rigid body transformation rotation and translation. This transformation process uses the relative pose between the cameras, that is, the external parameters of the camera.
[0096]...
Embodiment 3
[0133] The present embodiment provides a binocular vision-based height measuring device for the height limit of the highway limit shelf, including: an identification unit for identification and height measurement of the highway limit limit shelf, a controller unit for algorithm implementation and issuing control instructions, for An audible and visual alarm unit that sends out warning information, which is placed in the center of the front window glass or on the roof of the car;
[0134] (1) Recognition unit for identification and height measurement of highway limit elevation
[0135] The unit includes a binocular camera, the binocular camera uses a full HD resolution camera, and the binocular cameras are installed side by side;
[0136] (2) Algorithm implementation and controller unit that issues control instructions
[0137] The control unit adopts a micro-control processor, and the micro-control processor has the characteristics of compact structure, which can effectively ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More