

Unmanned aerial vehicle obstacle avoidance method based on binocular vision system
A technology of binocular vision system and UAV, which is applied in the field of UAV obstacle avoidance based on binocular vision system, which can solve the problem of inaccurate control of UAV, inaccurate ranging results, and unsatisfactory noise reduction effect of depth map and other issues, to achieve the effect of accurate control of drones, improvement of accuracy rate, and reduction of accident rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the technical problems, technical solutions and beneficial effects to be solved by the present invention clearer, the present invention will be further described in detail in combination with the embodiments and accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. The technical solutions of the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings, but the scope of protection is not limited thereto.
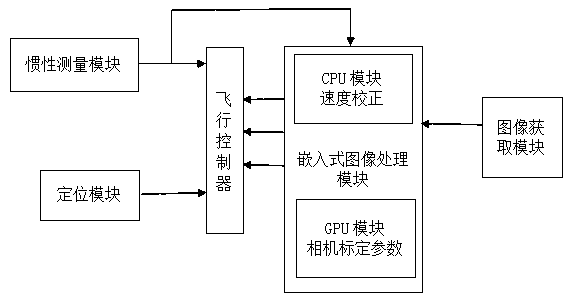
[0045] Such as image 3 As shown, the present invention provides a UAV-oriented control system for obstacle avoidance, including a positioning module, an inertial measurement module, an image acquisition module and an embedded image processing module.
[0046] Among them, the image acquisition module includes a binocular vision system, which is fixed in front of the drone and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More