

Bionic hippocampus cognitive map construction method based on convolutional neural network
A convolutional neural network and cognitive map technology, applied in the field of brain-like computing and intelligent robot navigation, can solve problems such as poor robustness and mismatching, and achieve the effect of solving the problem of mismatching, reducing storage space and improving retrieval efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Application scenario: The present invention can be applied to target-based navigation of robots in indoor environments. The robot can determine its location by observing the environment, and by observing the image of the destination environment, the location of the target can be determined. And then reach the destination through path planning or the path in memory.
[0026] The method will be described in detail below in conjunction with the accompanying drawings and examples.
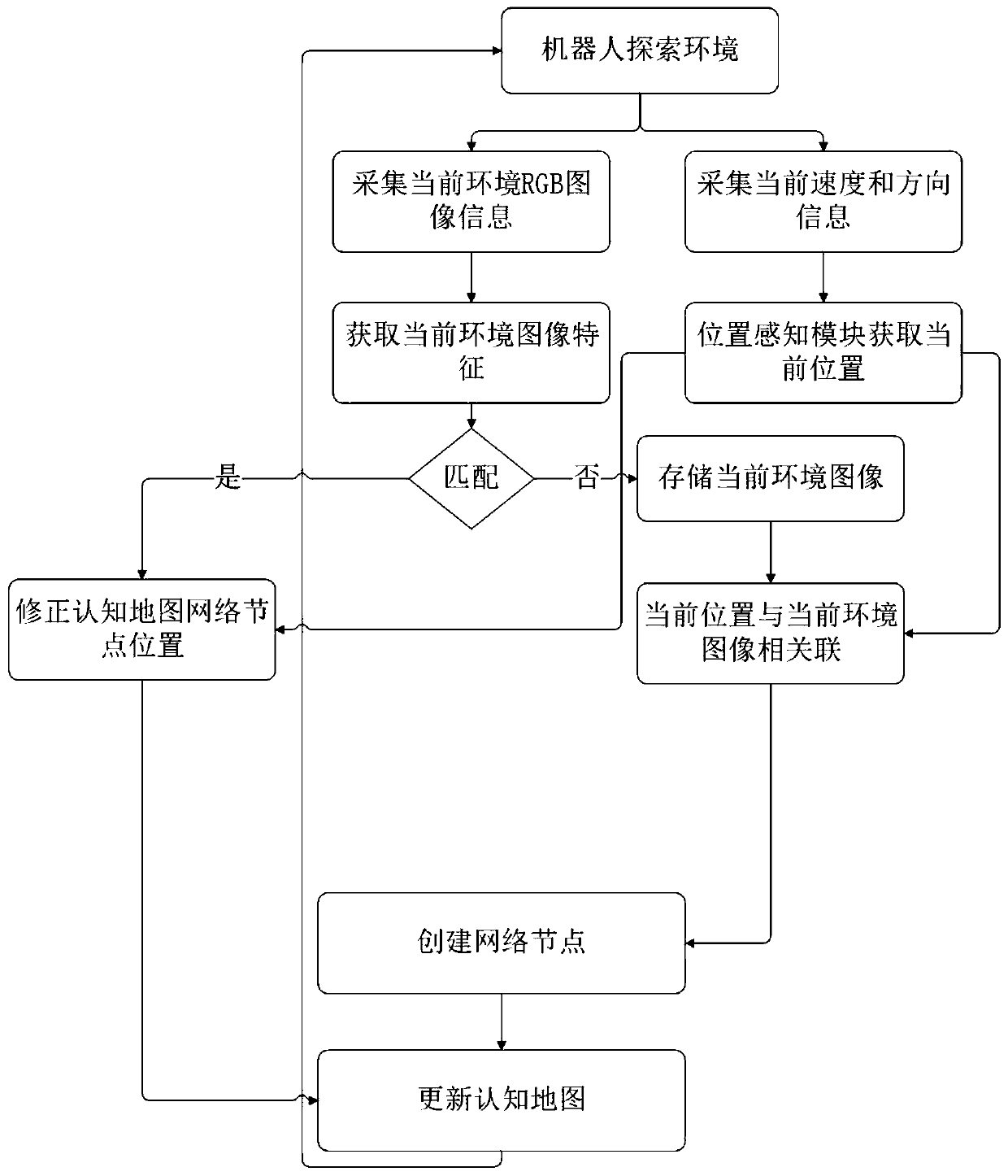
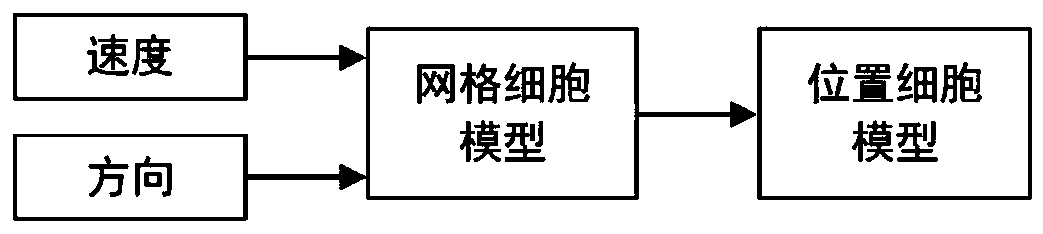
[0027] figure 1 It shows the flow chart of the bionic hippocampus cognitive map construction method based on convolutional neural network. First, when the robot explores in the environment, the speed, direction and RGB image information of the robot are collected. Then input the speed and direction information to the position perception module to obtain the current position information of the robot; input the RGB image to the vision processing module to obtain the image characteristics of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More