

Indoor positioning and navigating method of robot
An indoor positioning and robot technology, applied in the field of indoor positioning and navigation of robots, can solve the problems of map offset, high power consumption, and difficult to install, and achieve the effects of eliminating integration errors, long service life, and easy installation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
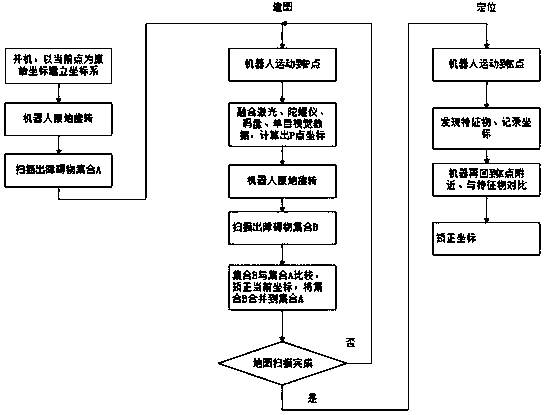
Method used
Image

Examples
Embodiment Construction
[0043] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
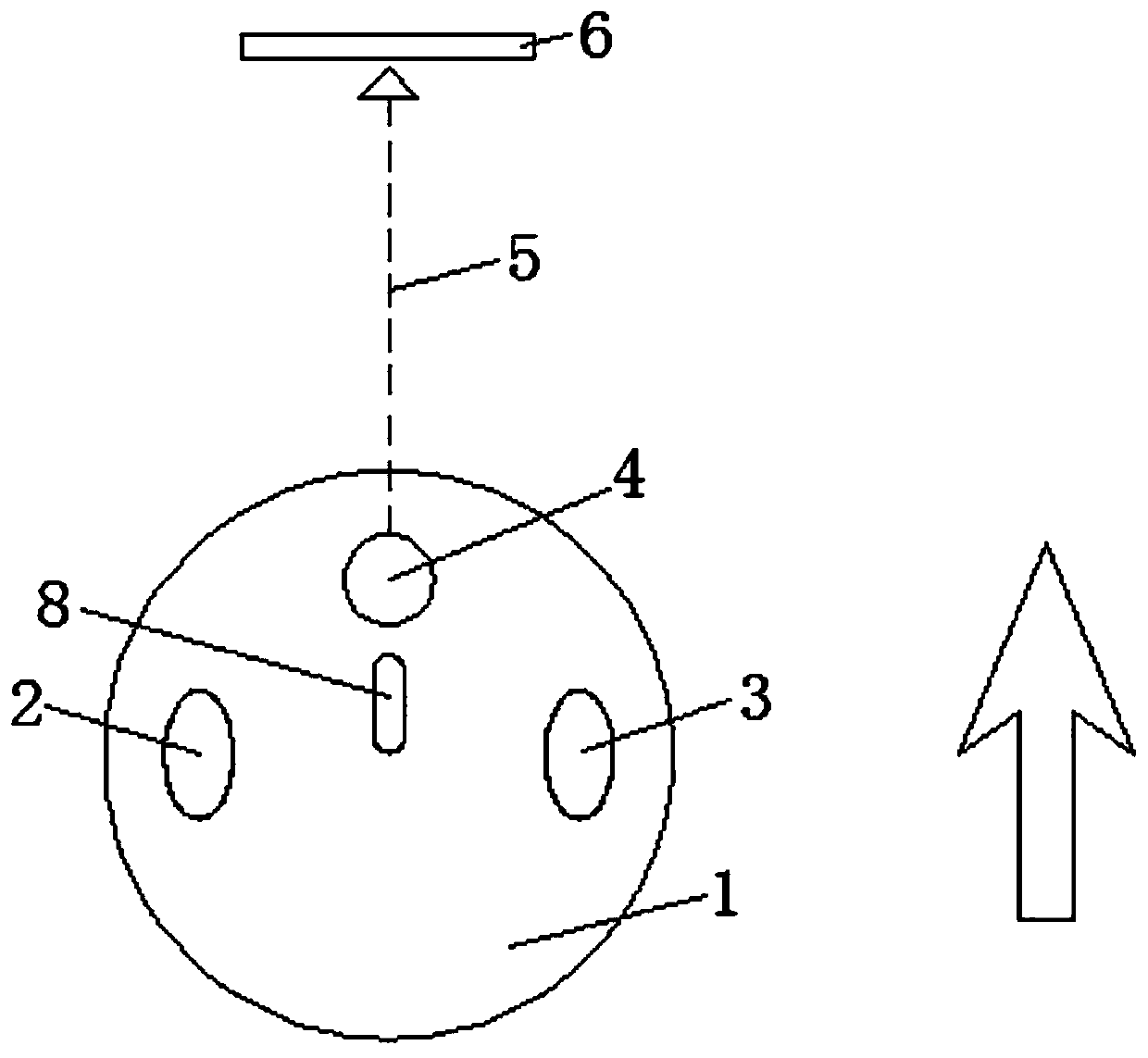
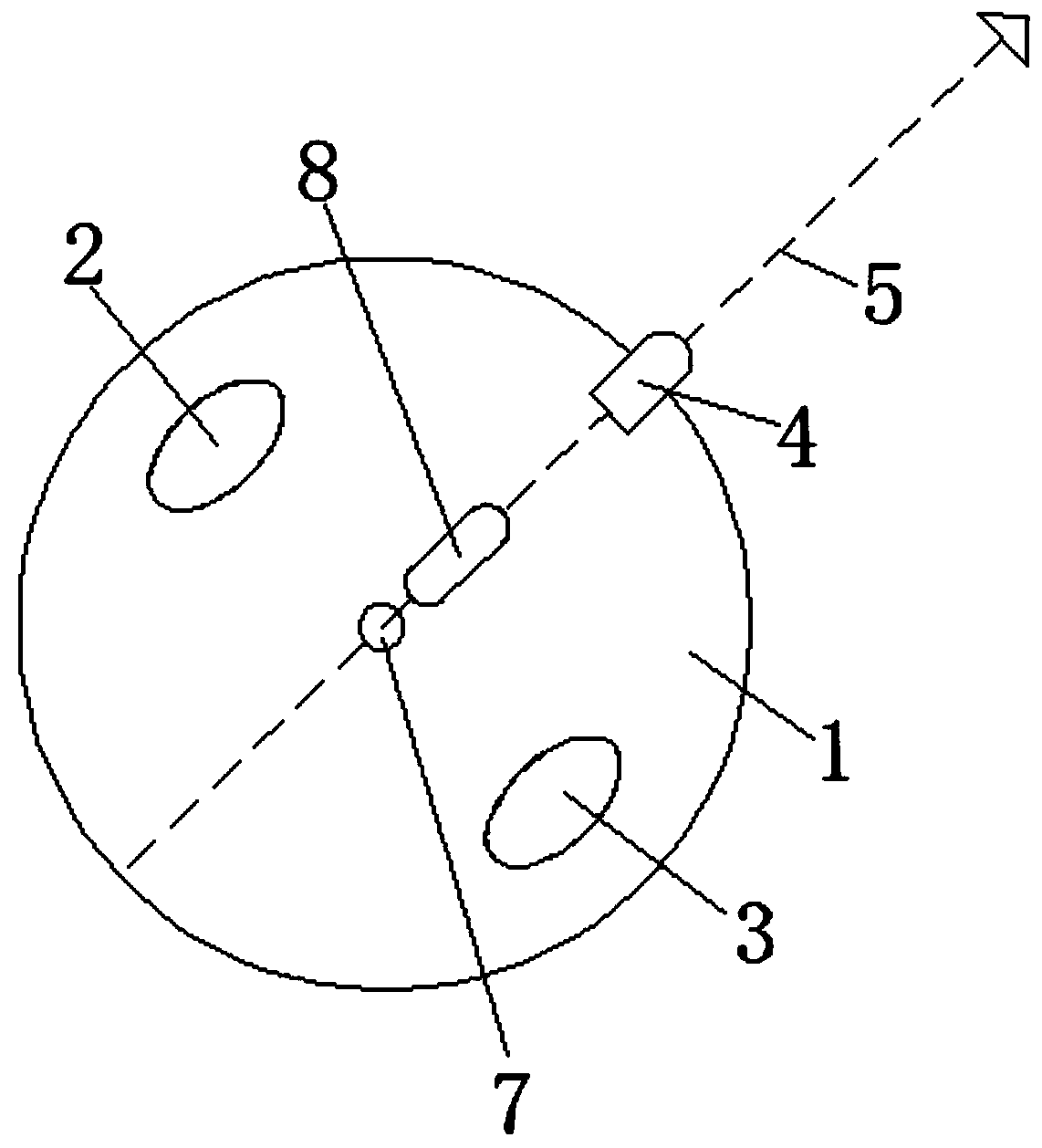
[0044] see Figure 1-5 , the present invention provides a technical solution: a method for indoor positioning and navigation of a robot, including a robot body 1, a left driving wheel 2, a right driving wheel 3, a fixed single-point laser ranging module 4, and a laser ranging line 5, obstacle 6, robot circle center 7, monocular camera 8, gyroscope module and MCU control module, the bottom of described robot body 1 and the two ends that are positioned at robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More