

Real-time acquisition method for early warning range applicable to low-altitude drone
A real-time acquisition, unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of increased collision risk, greater impact on the quality of wireless signals, and impact on the operation efficiency of unmanned aerial vehicles, and achieves the effect of improving operation efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
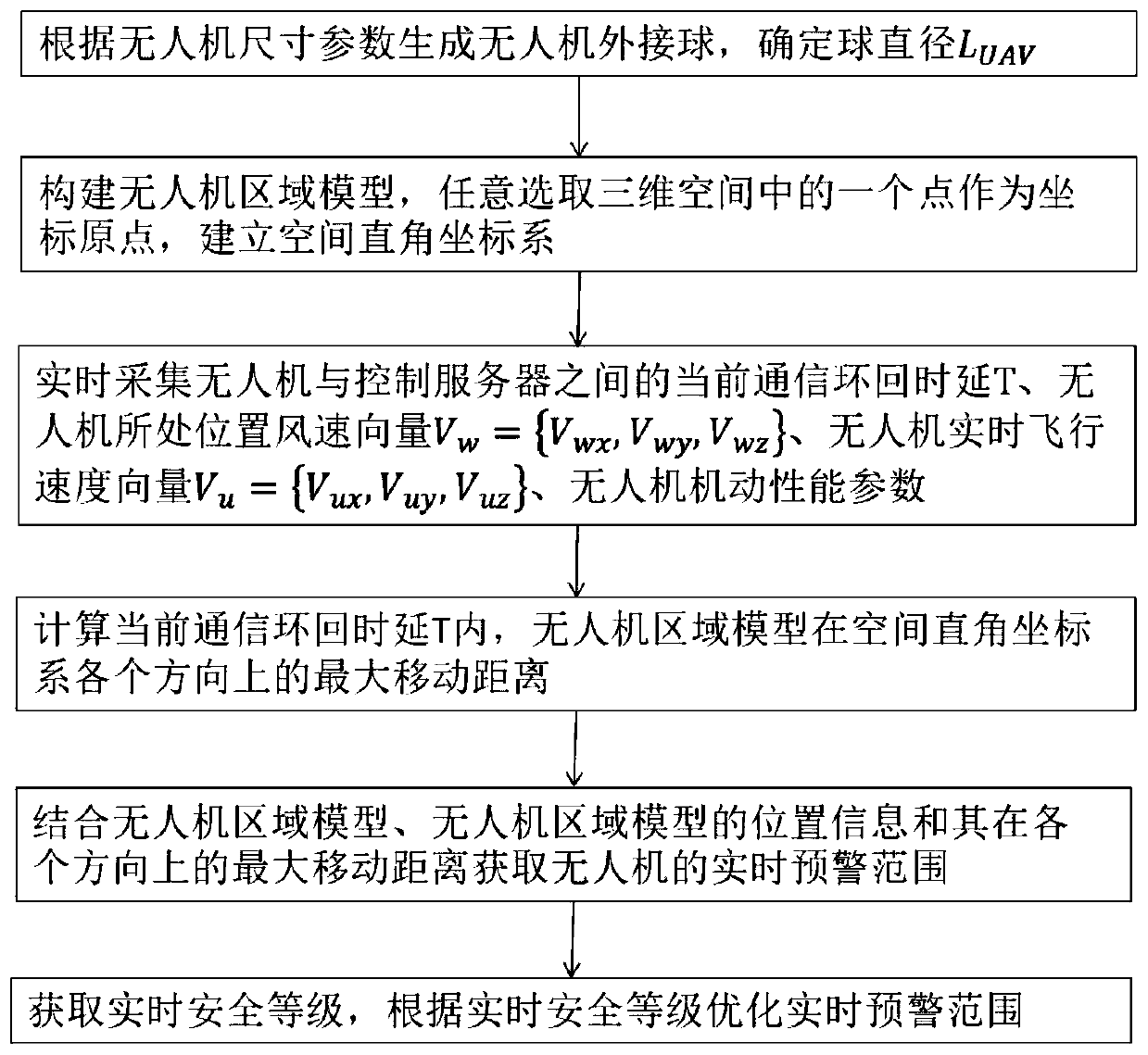
[0047] combine figure 1 , the present invention mentions a method for real-time acquisition of early warning range suitable for low-altitude unmanned aerial vehicles, said method comprising:
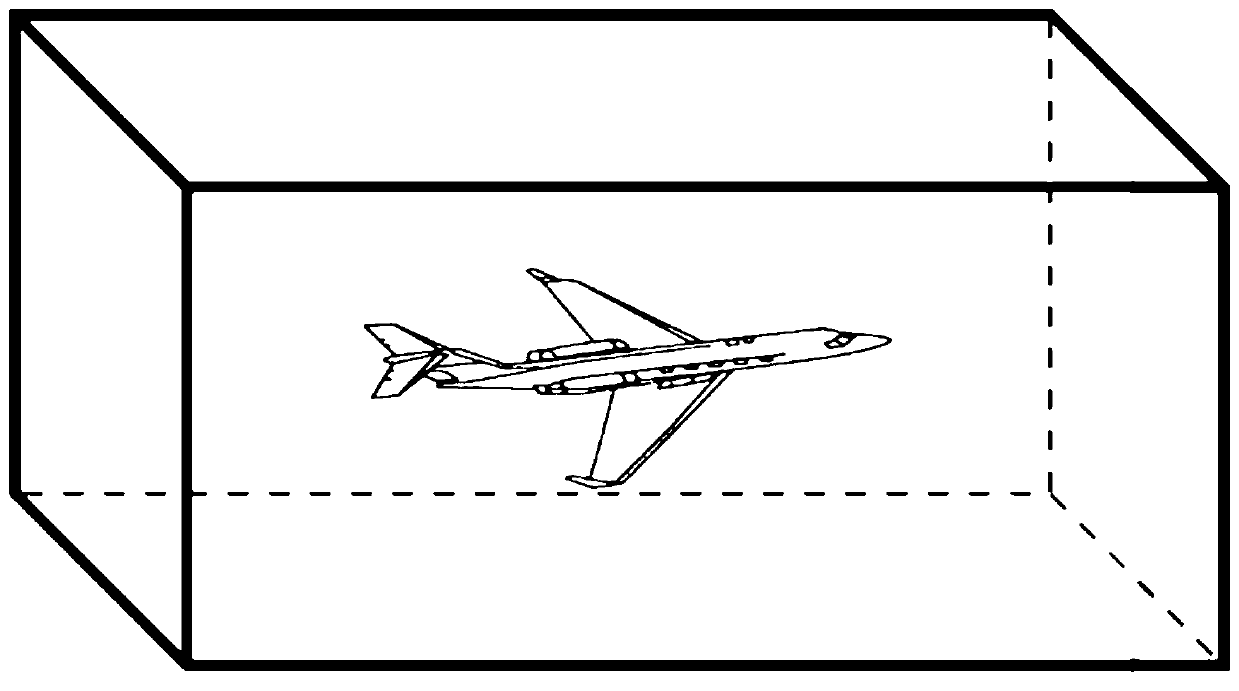
[0048] S1: Generate the circumscribed ball of the drone according to the size parameters of the drone, and determine the diameter L of the ball UAV .
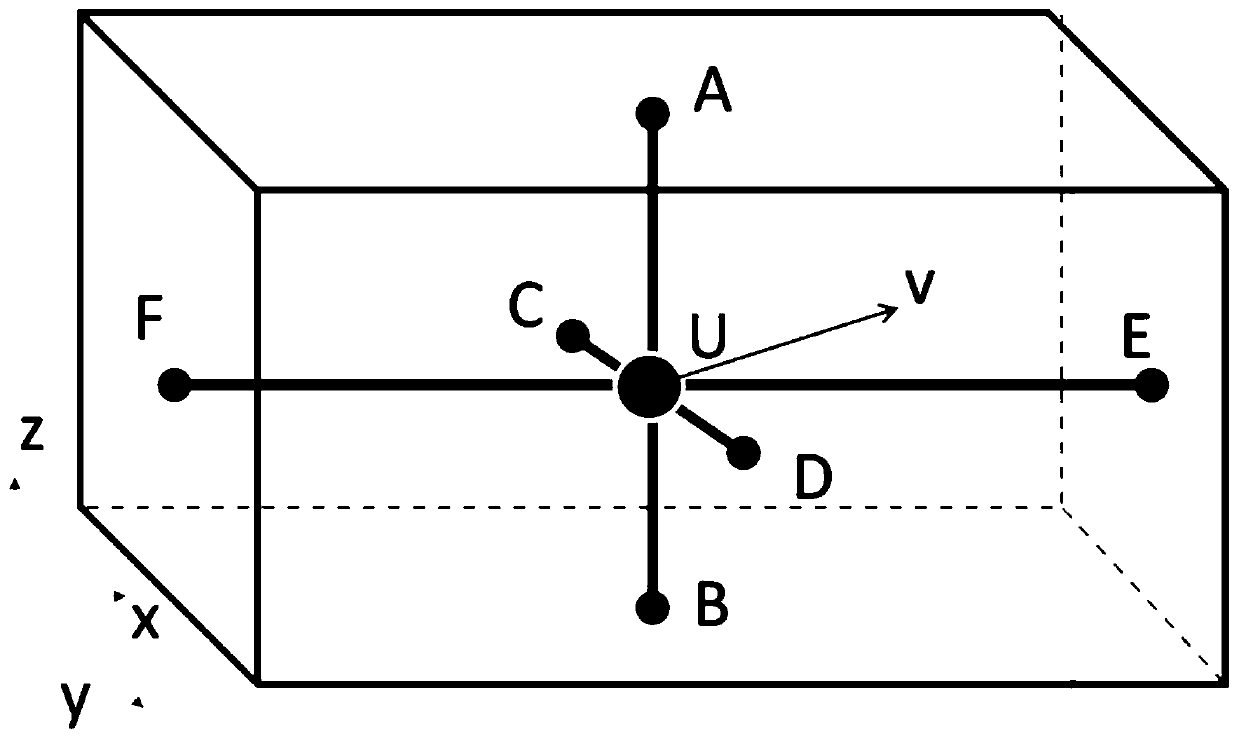
[0049] S2: Construct the UAV area model, arbitrarily select a point in three-dimensional space as the coordinate origin, and establish a spatial rectangular coordinate system, which includes the x-axis and y-axis in the horizontal direction and the vertical axis in the vertical direction. z-axis.
[0050] S3: Real-time collection of the current communication loopback delay T between the drone and the control server, and the wind speed vector V of the drone'...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More